MoCap Object Frames¶
Grasp trajectories should be expressed in an object-centric coordinate system.
Hence, we have to define the frame of each grasped object. We do this in
the module hand_embodiment.mocap_objects.
Each MoCap object has a set of markers associated with it. Placement on the object is indicated in a docstring of the corresponding class (in a top view). For each object we define default marker positions in the object coordinate system and a function to reconstruct the pose of the object from actual marker positions. The pose of the object is the pose of the marker frame in the MoCap world frame.
Furthermore, for visualization we need meshes and their relation to the
marker frame. These are defined in hand_embodiment.vis_utils. Each
object visualization class contains the transformation markers2mesh as
an attribute. Furthermore, it loads the mesh in its constructor along with
the correct color.
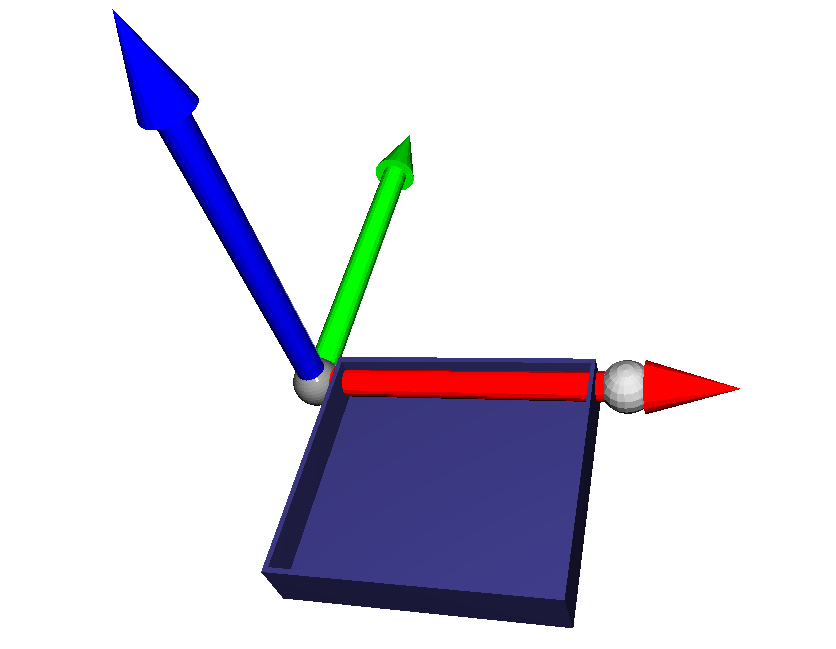
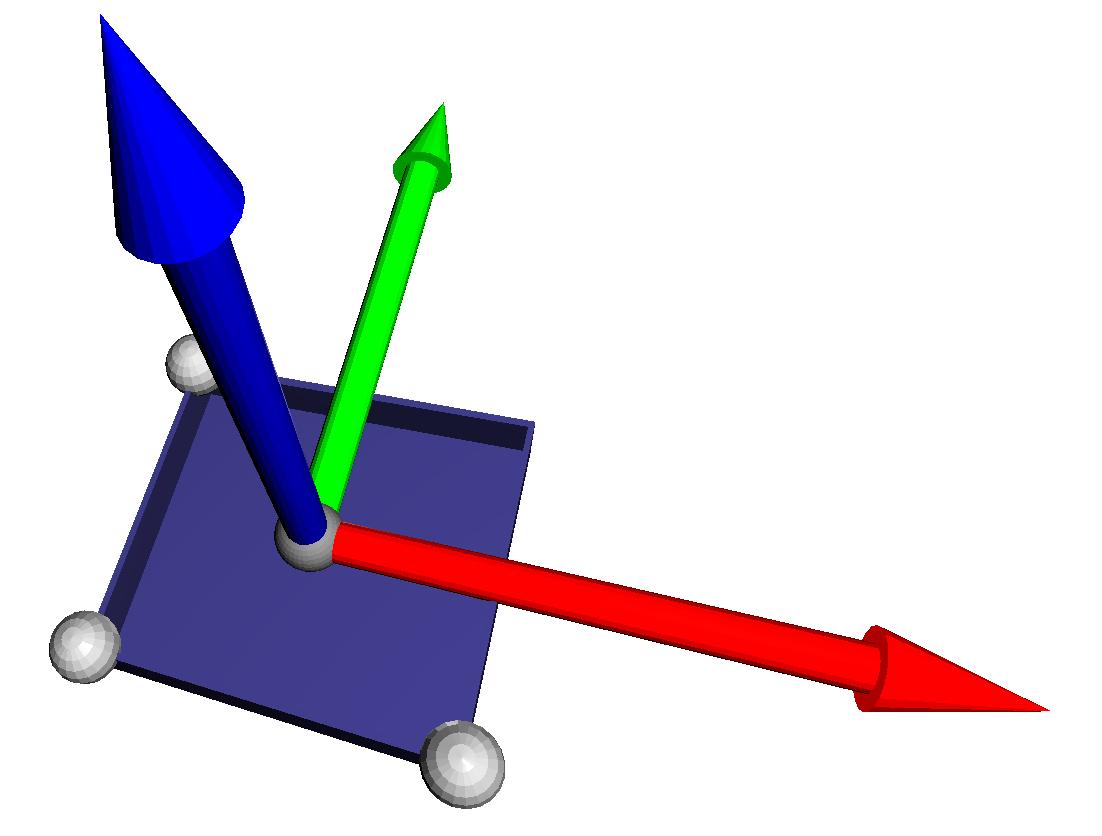
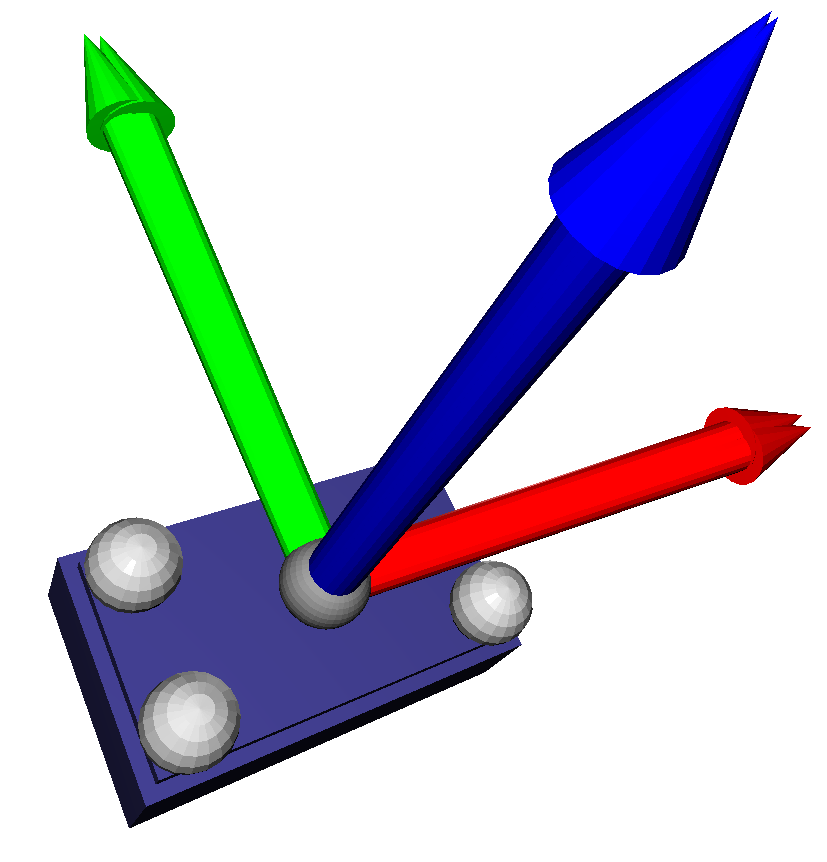
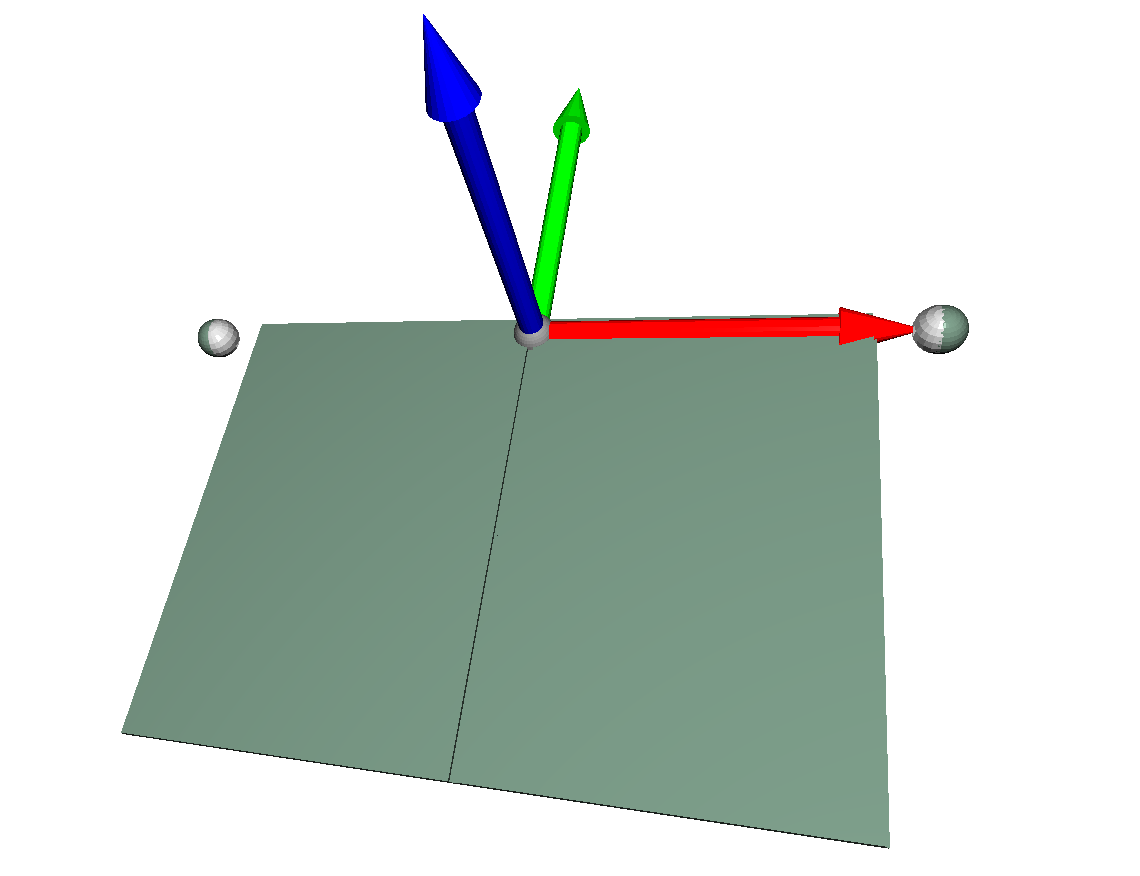
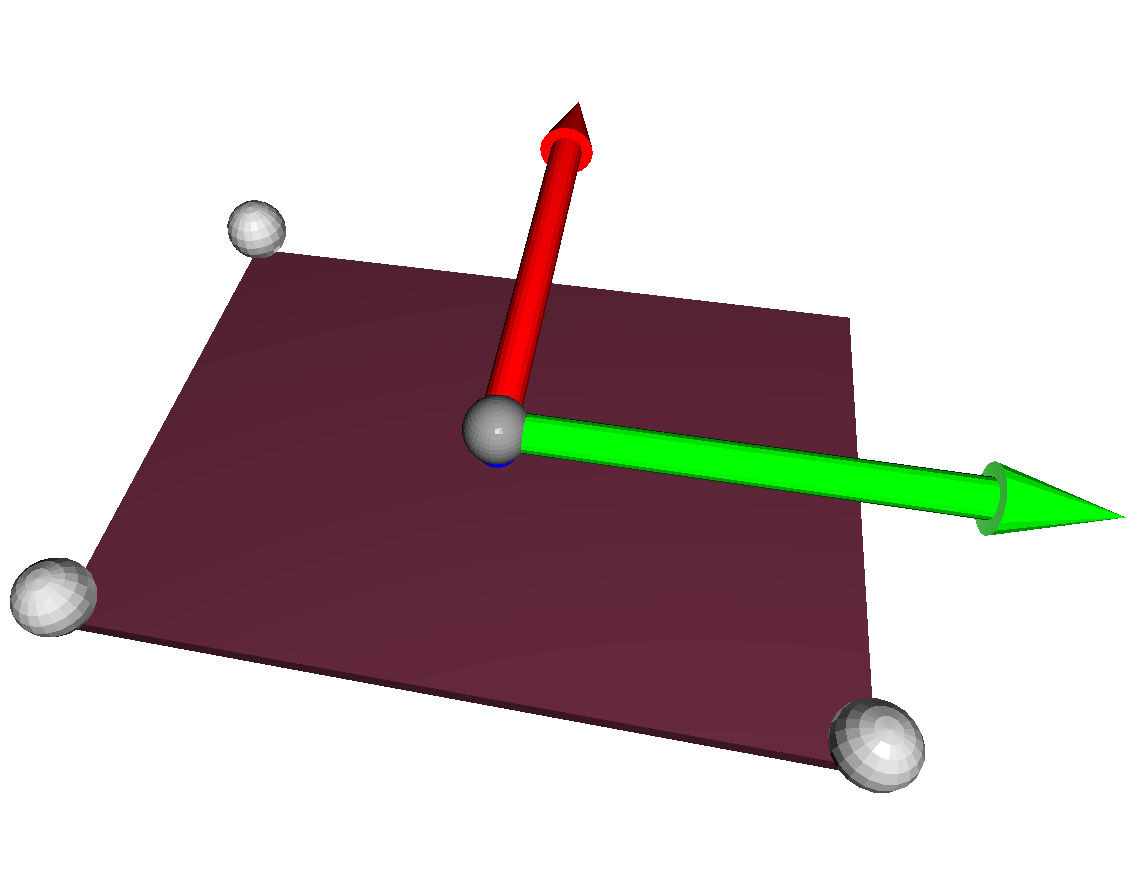
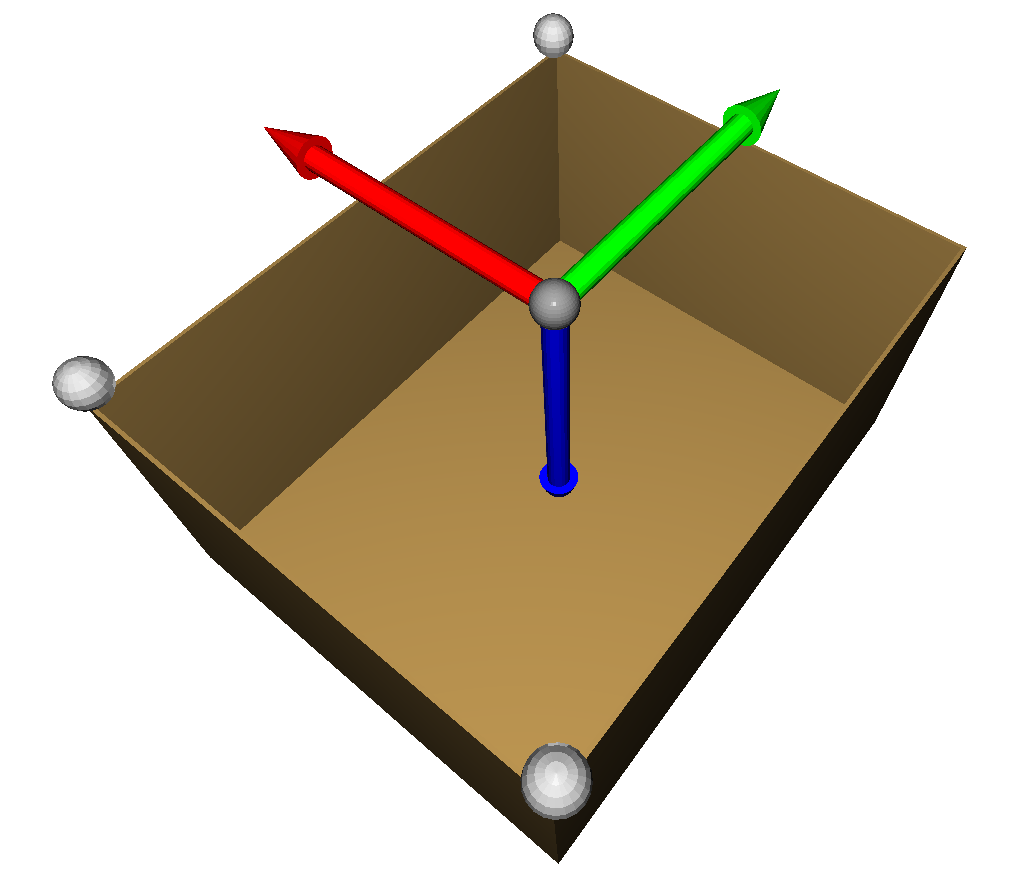
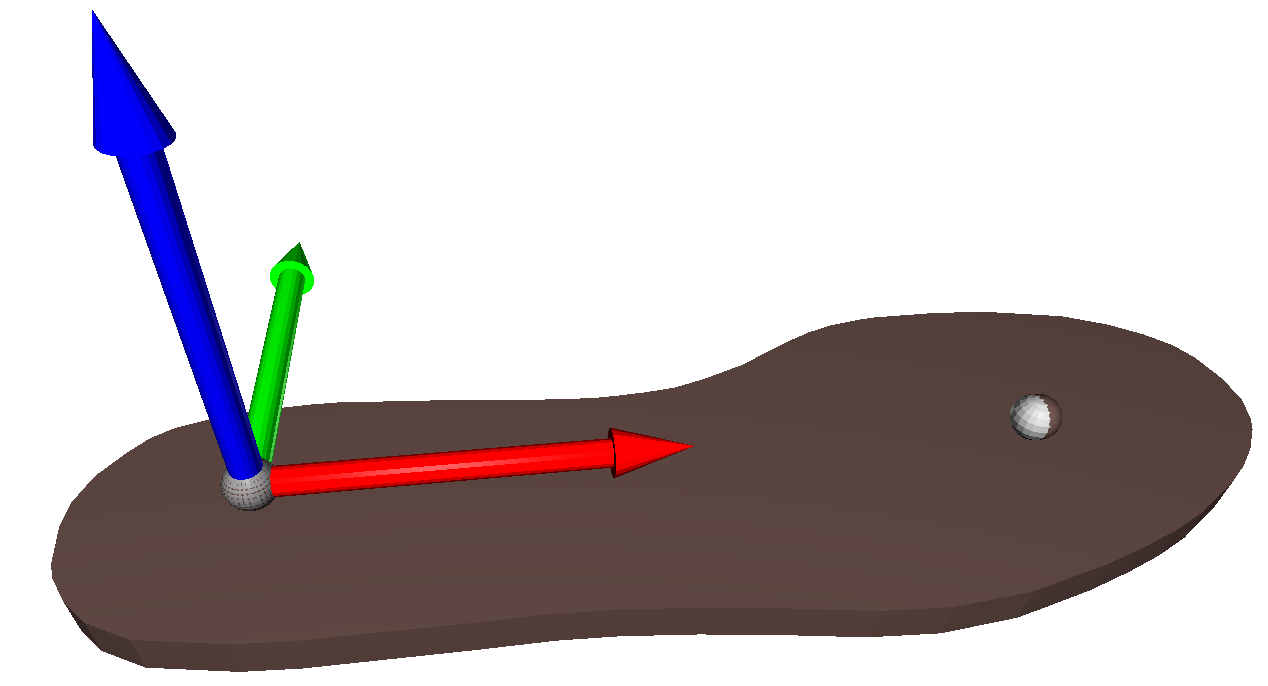
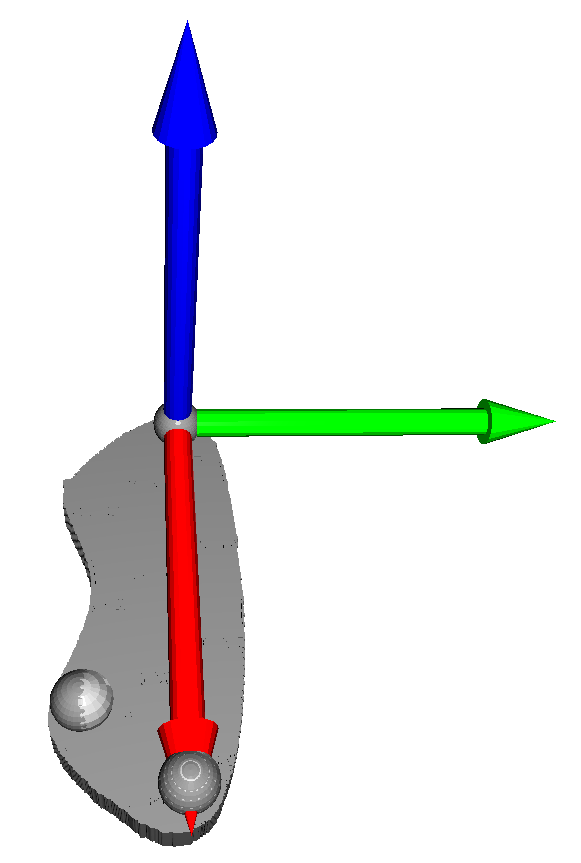
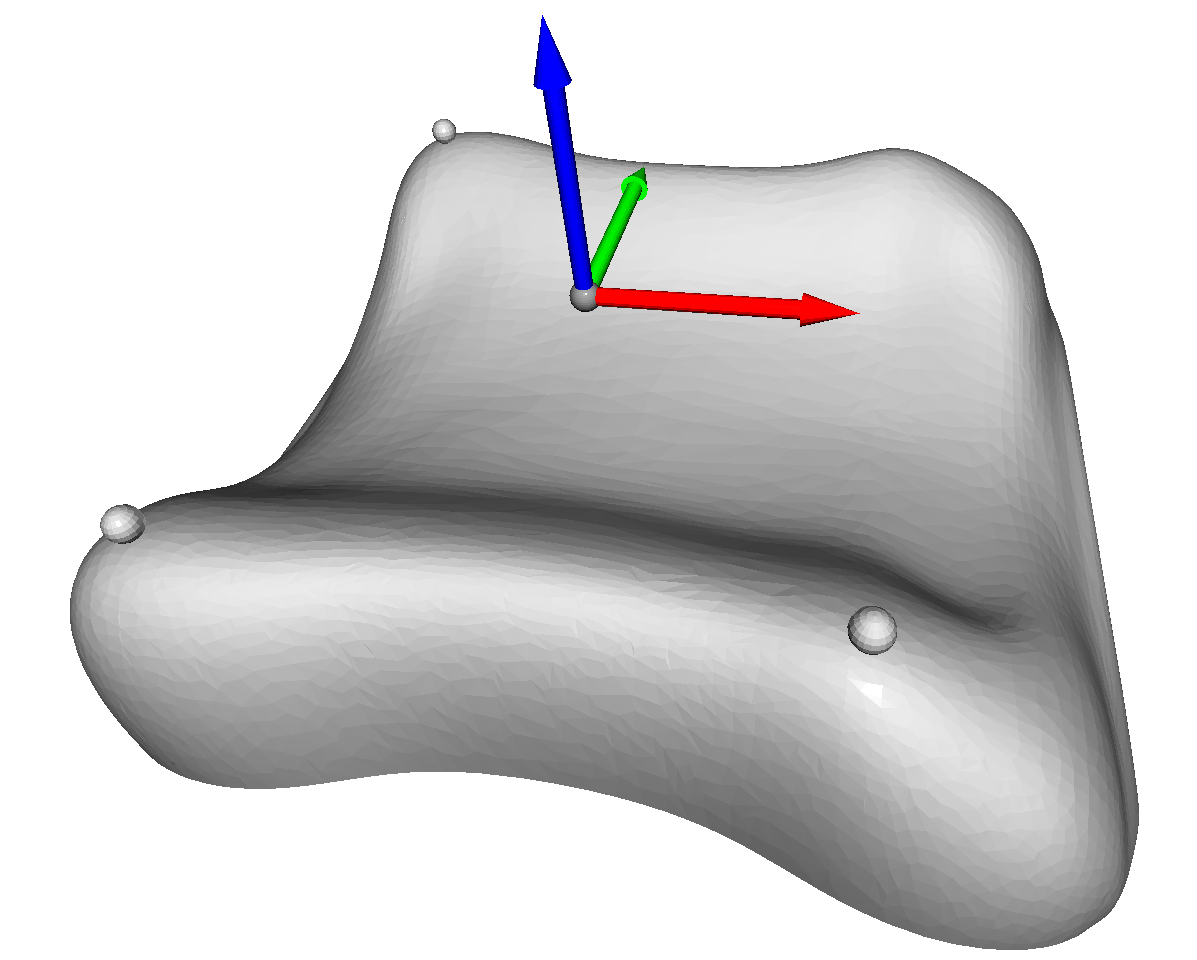
Here are the currently supported objects. In each object you see the mesh, the markers used to track the object’s pose and the frame defined based on the marker positions.
Available Objects¶
Electronic Components¶
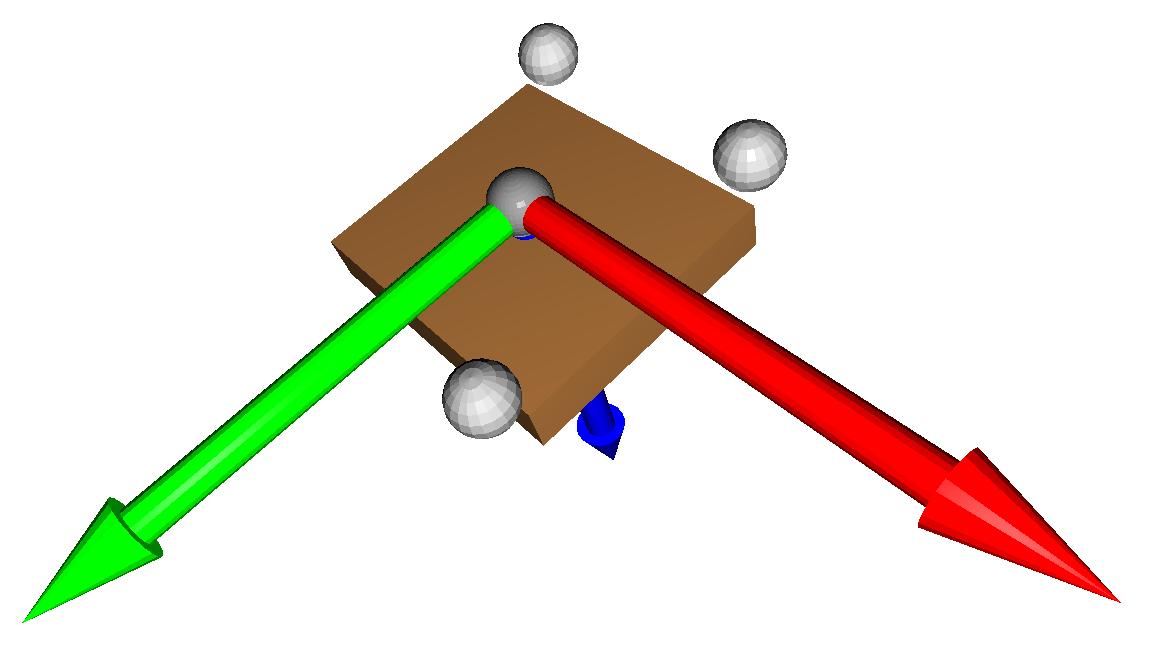
OSAI Case¶
Small OSAI Case¶
Open Passport¶
Closed Passport¶
Passport Box¶
Insole¶
Protector¶
Small Pillow¶
Big Pillow¶
