![]()
![]()

![]()
Movement Primitives#
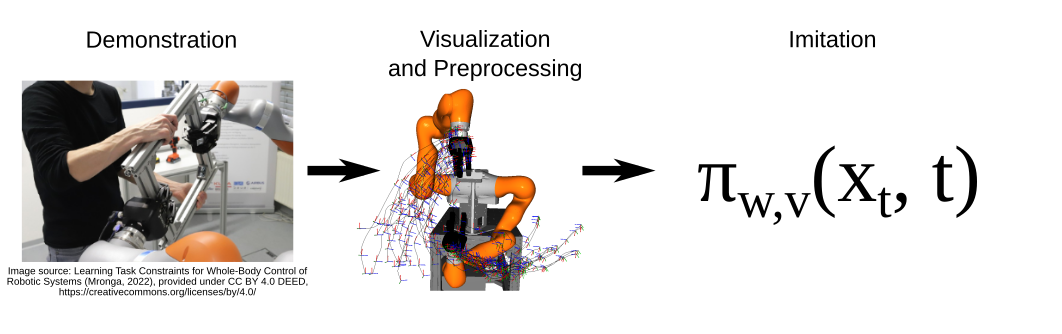
Dynamical movement primitives (DMPs), probabilistic movement primitives (ProMPs), and spatially coupled bimanual DMPs for imitation learning.
Movement primitives are a common representation of movements in robotics for imitation learning, reinforcement learning, and black-box optimization of behaviors. There are many types and variations. The Python library movement_primitives focuses on imitation learning, generalization, and adaptation of movement primitives in Cartesian space. It implements dynamical movement primitives, probabilistic movement primitives, as well as Cartesian and dual Cartesian movement primitives with coupling terms to constrain relative movements in bimanual manipulation. They are implemented in Cython to speed up online execution and batch processing in an offline setting. In addition, the library provides tools for data analysis and movement evaluation. It can be installed directly from PyPI.
Content#
Statement of Need#
Movement primitives are a common group of policy representations in robotics. They are able to represent complex movement patterns, allow temporal and spatial modification, offer stability guarantees, and are suitable for imitation learning without complicated hyperparameter tuning, which are advantages over general function approximators like neural networks. Movement primitives are white-box models for movement generation and allow to control several aspects of the movement. There are types of dynamical movement primitives that allow to directly control the goal in state space, the final velocity, or the relative pose of two robotic end-effectors. Probabilistic movement primitives capture distributions of movements adequately and allow conditioning in state space and blending of multiple movements. The main disadvantage of movement primitives in comparison to general function approximators is that they are limited in their capacity to represent behavior that takes into account complex sensor data during execution. Nevertheless, various types of movement primitives have proven to be a reliable and effective tool in robot learning. A reliable tool deserves a similarly reliable open source implementation. However, there are only a few actively maintained, documented, and easy to use implementations. One of these is the library movement_primitives. It combines several types of dynamical movement primitives and probabilistic movement primitives in a single library with a focus on Cartesian and bimanual movements.
Features#
Dynamical Movement Primitives (DMPs) for
positions (with fast Runge-Kutta integration)
Cartesian position and orientation (with fast Cython implementation)
Dual Cartesian position and orientation (with fast Cython implementation)
Coupling terms for synchronization of position and/or orientation of dual Cartesian DMPs
Propagation of DMP weight distribution to state space distribution
Probabilistic Movement Primitives (ProMPs)
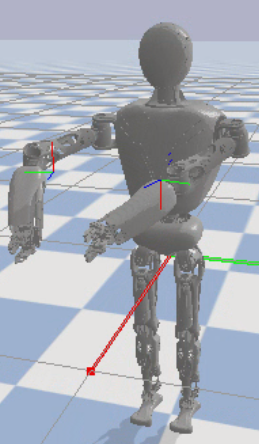
Left: Example of dual Cartesian DMP with RH5 Manus. Right: Example of joint space DMP with UR5.
API Documentation#
The API documentation is available here.
Install Library#
This library requires Python 3.6 or later and pip is recommended for the
installation. In the following instructions, we assume that the command
python refers to Python 3. If you use the system’s Python version, you
might have to add the flag --user to any installation command.
PyPI (Recommended)#
I recommend to install the library via pip from the Python package index (PyPI):
python -m pip install movement_primitives[all]
If you don’t want to have all dependencies installed, just omit [all].
This will install the latest release. If you want to install the latest development version, you have to install from git.
Git + Editable Mode#
Editable mode means that you don’t have to install the library after editing the source code. Changes will be directly available in the installed library since pip creates a symlink.
You can clone the git repository and install it in editable mode with pip:
git clone https://github.com/dfki-ric/movement_primitives.git
python -m pip install -e .[all]
If you don’t want to have all dependencies installed, just omit [all].
Git#
Alternatively, you can install the library and its dependencies without pip from the git repository:
git clone https://github.com/dfki-ric/movement_primitives.git
python setup.py install
Build Cython Extension#
You could also just build the Cython extension with
python setup.py build_ext --inplace
Dependencies#
An alternative way to install dependencies is the requirements.txt file in the main folder of the git repository:
python -m pip install -r requirements.txt
Examples#
You will find a lot of examples in the subfolder
examples/.
Here are just some highlights to showcase the library.
Potential Field of 2D DMP#
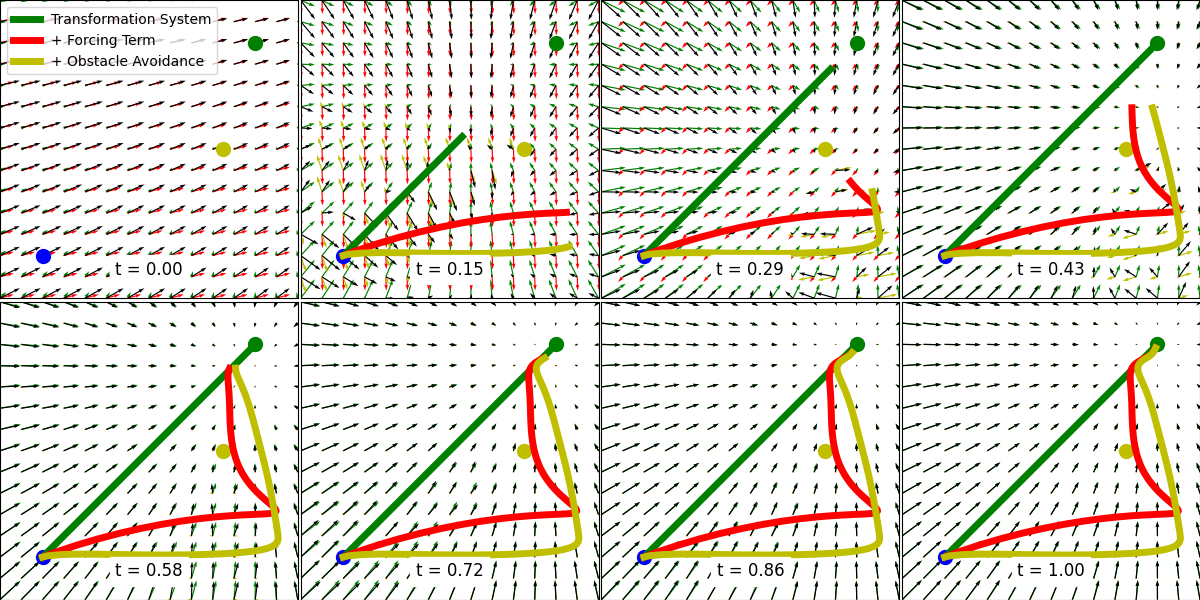
A Dynamical Movement Primitive defines a potential field that superimposes several components: transformation system (goal-directed movement), forcing term (learned shape), and coupling terms (e.g., obstacle avoidance).
DMP with Final Velocity#
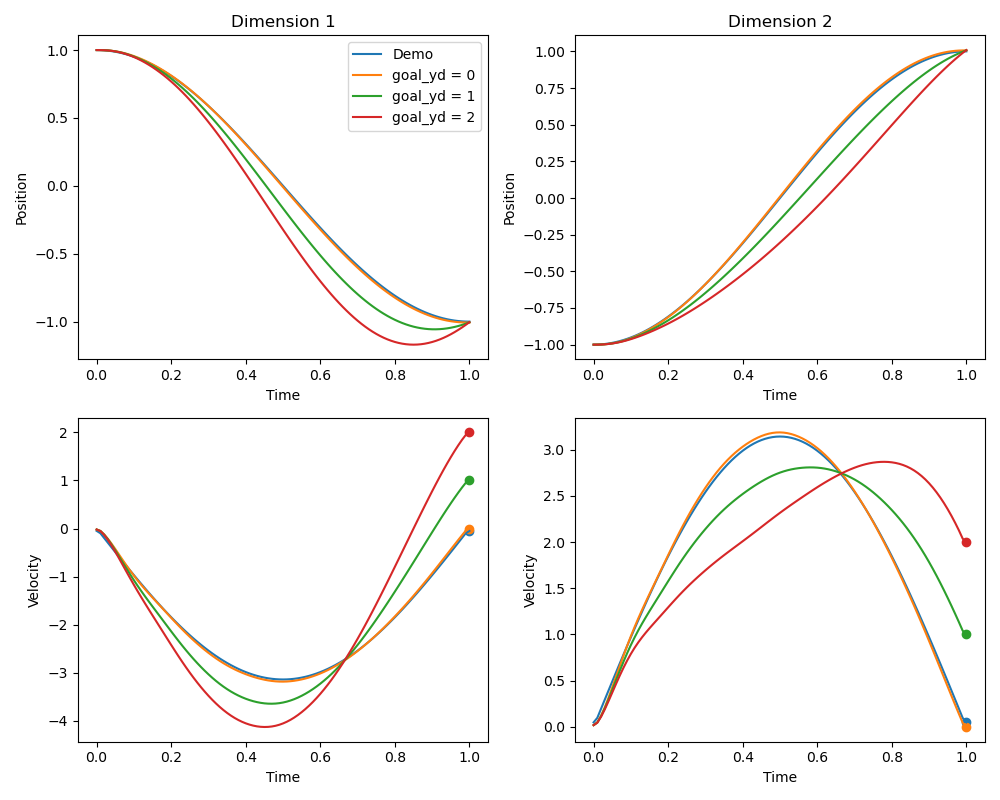
Not all DMPs allow a final velocity > 0. In this case we analyze the effect of changing final velocities in an appropriate variation of the DMP formulation that allows to set the final velocity.
ProMPs#
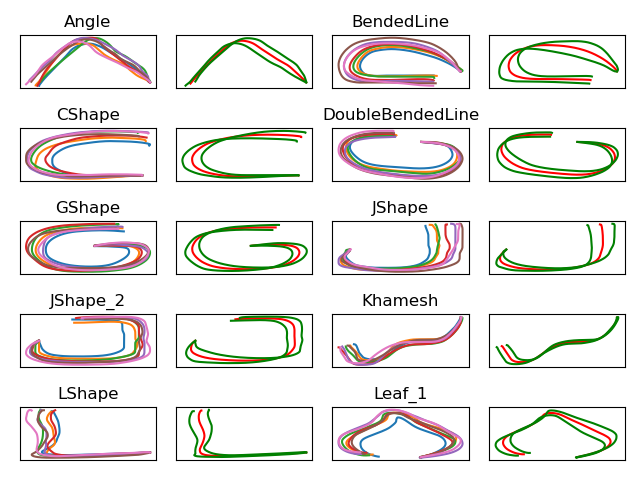
The LASA Handwriting dataset learned with ProMPs. The dataset consists of 2D handwriting motions. The first and third column of the plot represent demonstrations and the second and fourth column show the imitated ProMPs with 1-sigma interval.
Conditional ProMPs#
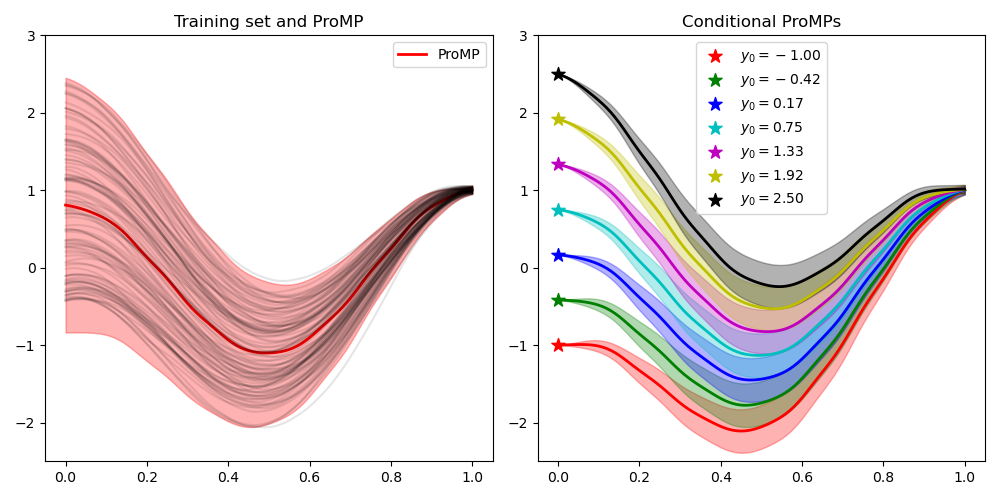
Probabilistic Movement Primitives (ProMPs) define distributions over trajectories that can be conditioned on viapoints. In this example, we plot the resulting posterior distribution after conditioning on varying start positions.
Cartesian DMPs#
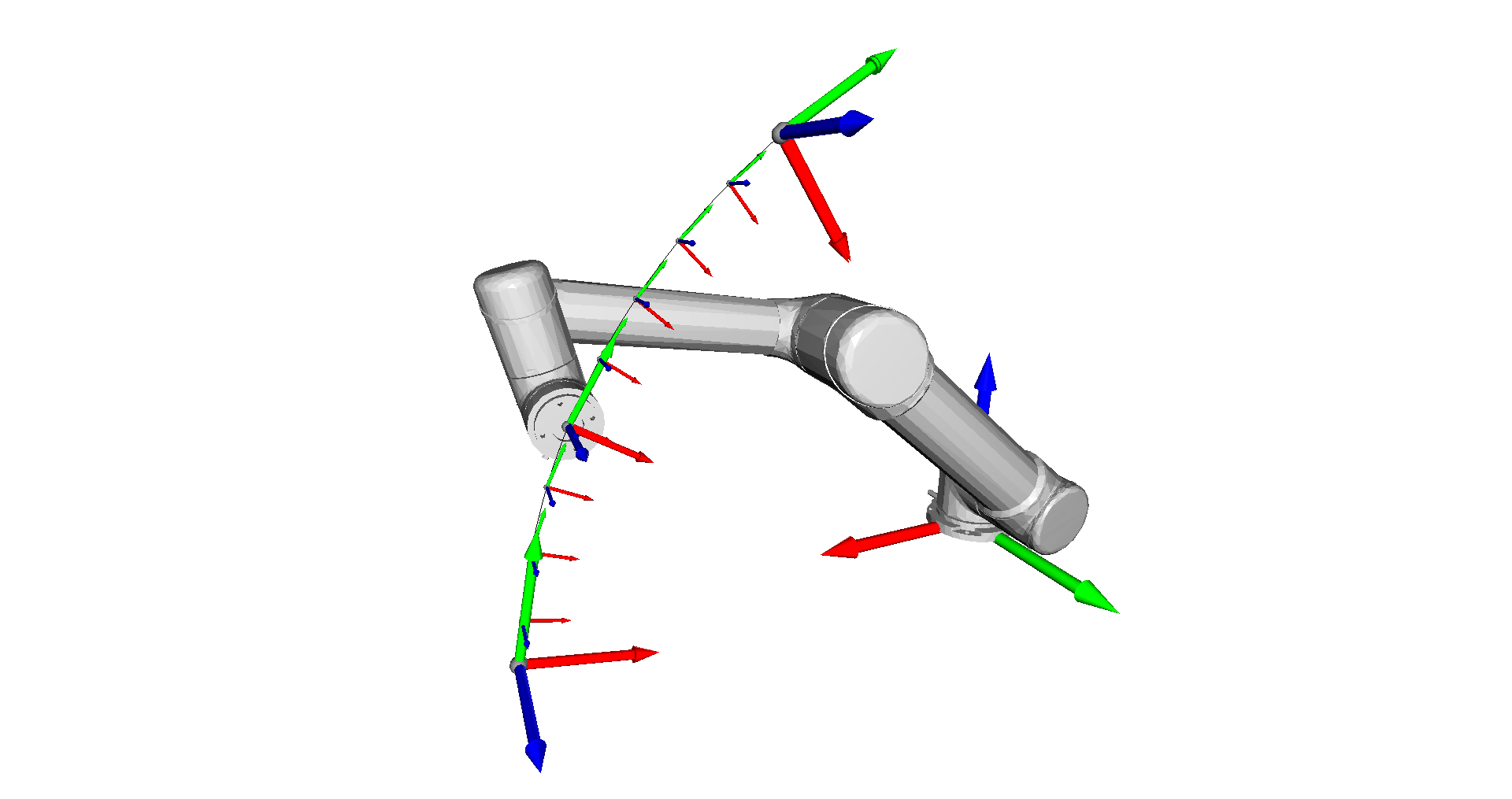
A trajectory is created manually, imitated with a Cartesian DMP, converted to a joint trajectory by inverse kinematics, and executed with a UR5.
Contextual ProMPs#
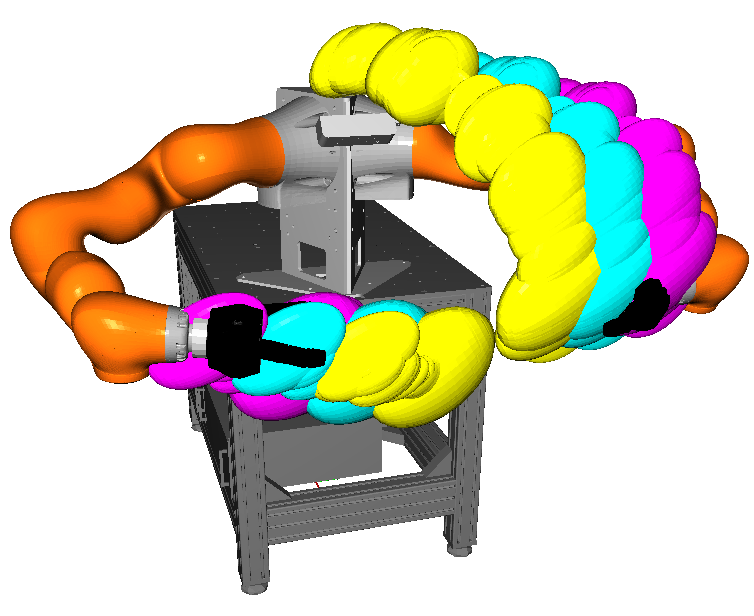
We use a dataset of Mronga and Kirchner (2021), in which a dual-arm robot rotates panels of varying widths. 10 demonstrations were recorded for 3 different panel widths through kinesthetic teaching. The panel width is the context over which we generalize with contextual ProMPs. We learn a joint distribution of contexts and ProMP weights, and then condition the distribution on the contexts to obtain a ProMP adapted to the context. Each color in the above visualizations corresponds to a ProMP for a different context.
Dependencies that are not publicly available:
Dataset: panel rotation dataset of Mronga and Kirchner (2021)
MoCap library
URDF of dual arm Kuka system from DFKI RIC’s HRC lab:
git clone git@git.hb.dfki.de:models-robots/kuka_lbr.git
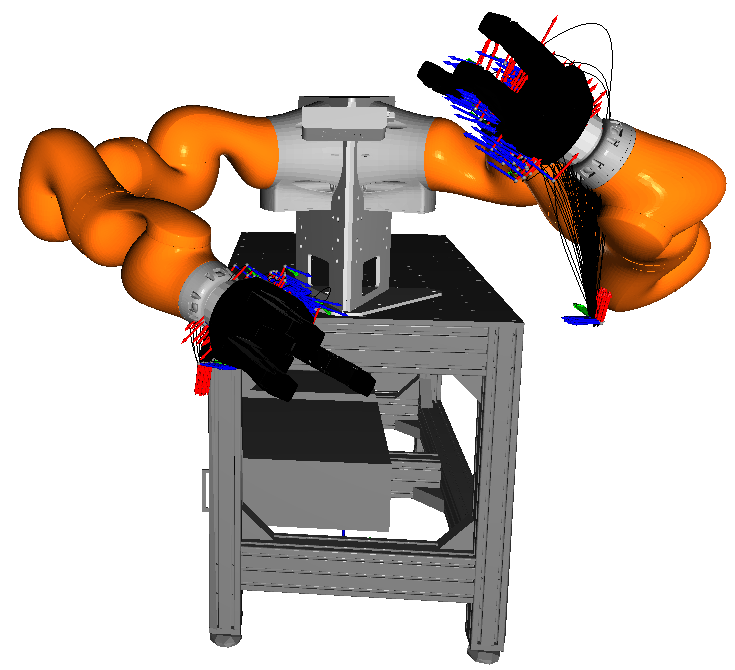
Dual Cartesian DMP#
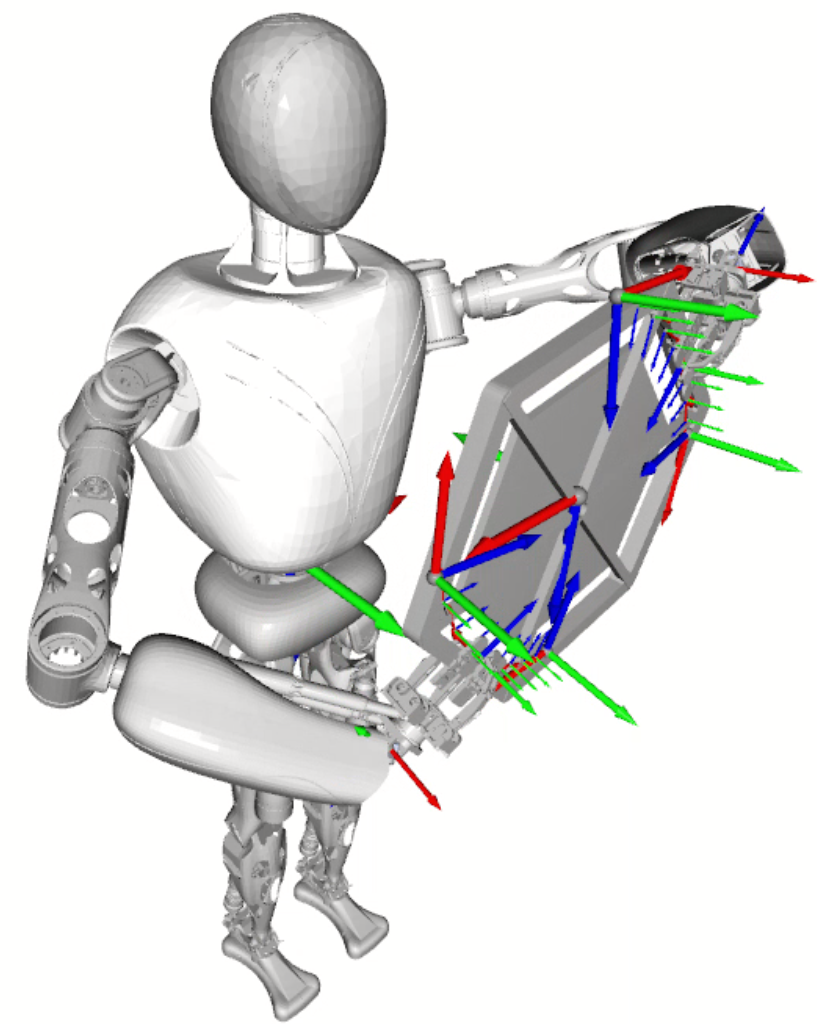
This library implements specific dual Cartesian DMPs to control dual-arm robotic systems like humanoid robots.
Dependencies that are not publicly available:
MoCap library
URDF of DFKI RIC’s RH5 robot:
git clone git@git.hb.dfki.de:models-robots/rh5_models/pybullet-only-arms-urdf.git --recursive
URDF of solar panel:
git clone git@git.hb.dfki.de:models-objects/solar_panels.git
Coupled Dual Cartesian DMP#
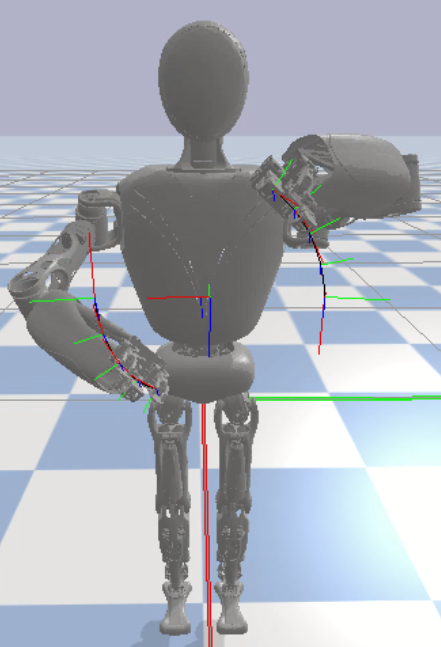
We can introduce a coupling term in a dual Cartesian DMP to constrain the relative position, orientation, or pose of two end-effectors of a dual-arm robot.
Dependencies that are not publicly available:
URDF of DFKI RIC’s gripper:
git clone git@git.hb.dfki.de:motto/abstract-urdf-gripper.git --recursive
URDF of DFKI RIC’s RH5 robot:
git clone git@git.hb.dfki.de:models-robots/rh5_models/pybullet-only-arms-urdf.git --recursive
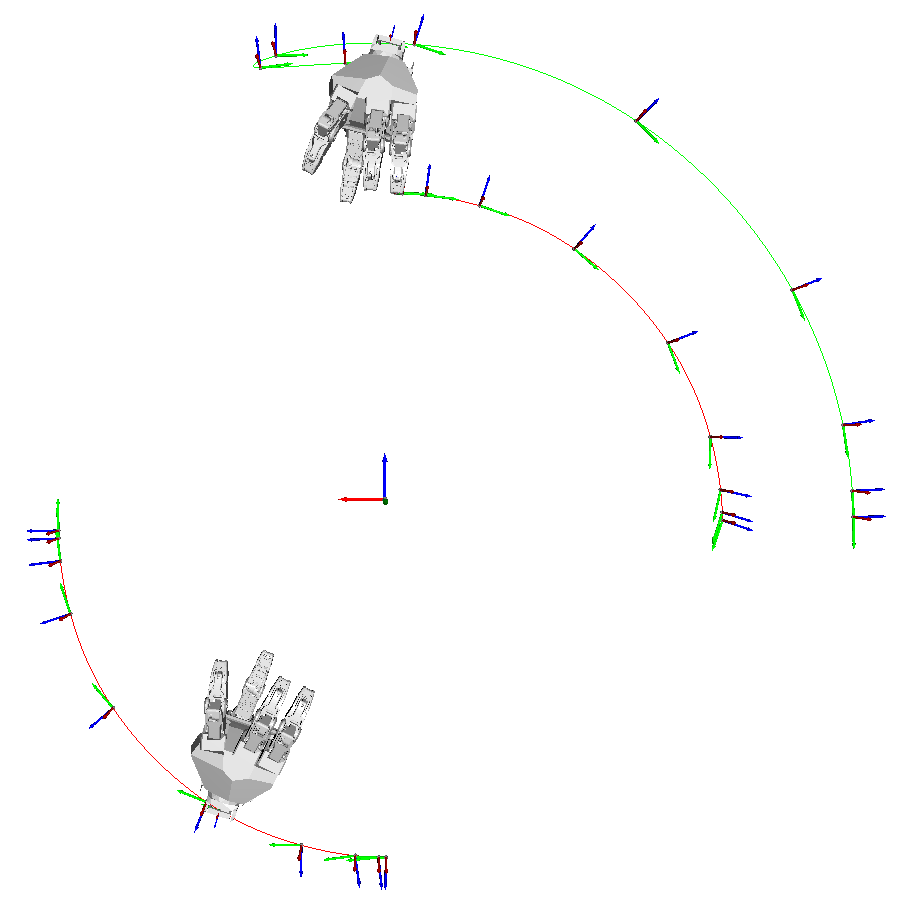
Propagation of DMP Distribution to State Space#
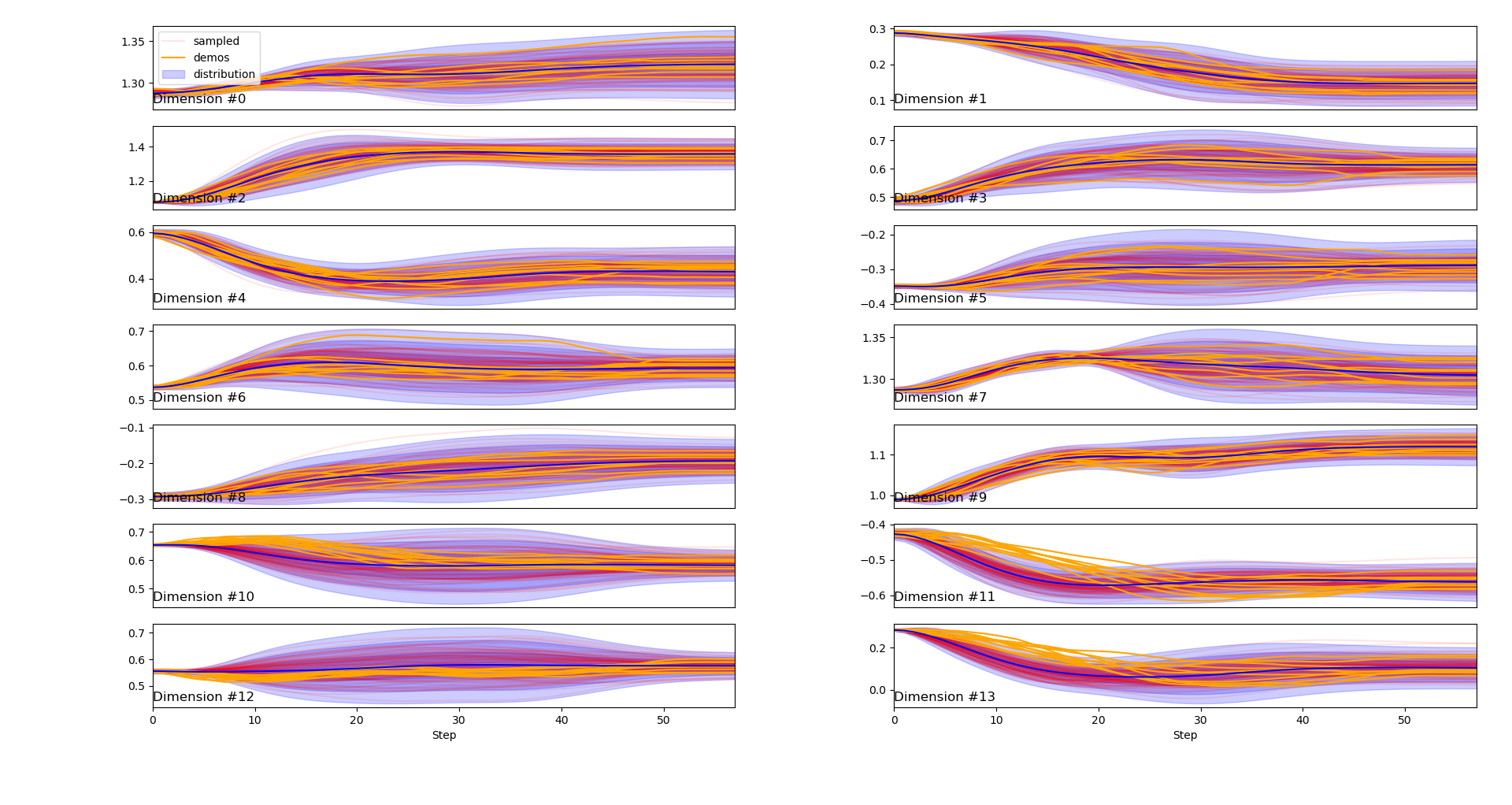
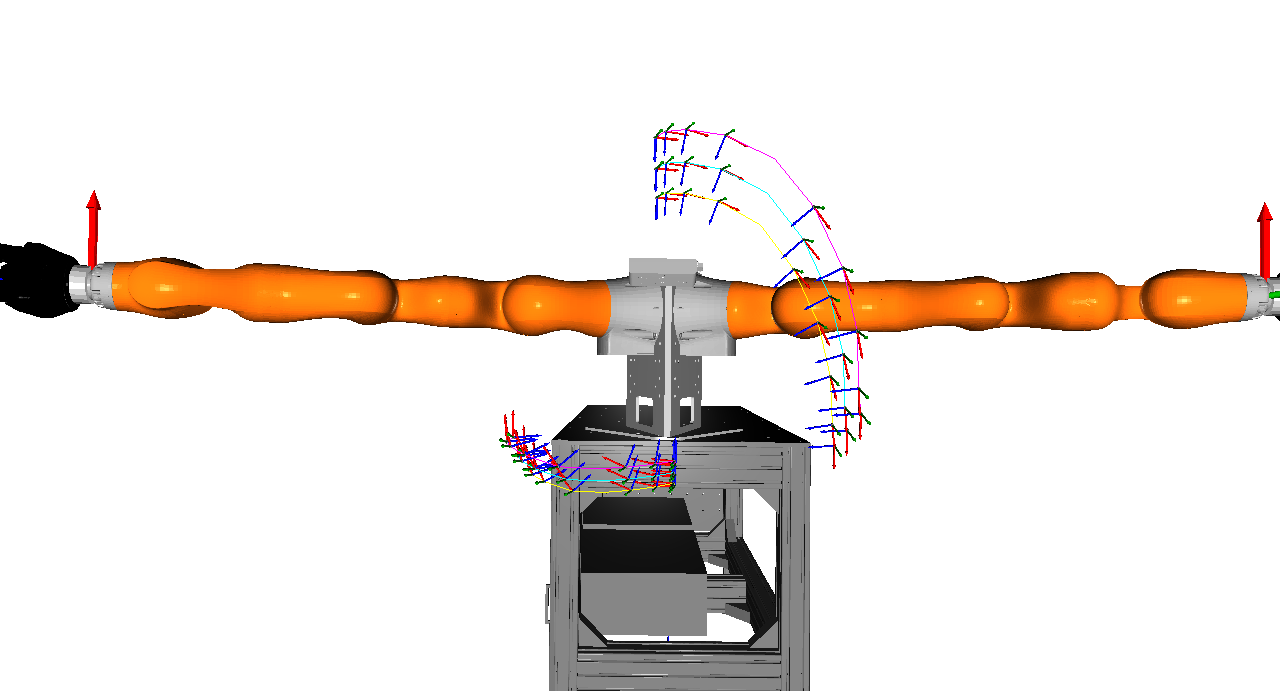
If we have a distribution over DMP parameters, we can propagate them to state space through an unscented transform. On the left we see the original demonstration of a dual-arm movement in state space (two 3D positions and two quaternions) and the distribution of several DMP weight vectors projected to the state space. On the right side we see several dual-arm trajectories sampled from the distribution in state space.
Dependencies that are not publicly available:
Dataset: panel rotation dataset of Mronga and Kirchner (2021)
MoCap library
URDF of dual arm Kuka system from DFKI RIC’s HRC lab:
git clone git@git.hb.dfki.de:models-robots/kuka_lbr.git
Build API Documentation#
You can build an API documentation with sphinx. You can install all dependencies with
python -m pip install movement_primitives[doc]
… and build the documentation from the folder doc/ with
make html
It will be located at doc/build/html/index.html.
Test#
To run the tests some python libraries are required:
python -m pip install -e .[test]
The tests are located in the folder test/ and can be executed with:
python -m pytest
This command searches for all files with test and executes the functions
with test_*. You will find a test coverage report at htmlcov/index.html.
Contributing#
You can report bugs in the issue tracker. If you have questions about the software, please use the discussions section. To add new features, documentation, or fix bugs you can open a pull request on GitHub. Directly pushing to the main branch is not allowed.
The recommended workflow to add a new feature, add documentation, or fix a bug is the following:
Push your changes to a branch (e.g., feature/x, doc/y, or fix/z) of your fork of the repository.
Open a pull request to the main branch of the main repository.
This is a checklist for new features:
are there unit tests?
does it have docstrings?
is it included in the API documentation?
run flake8 and pylint
should it be part of the readme?
should it be included in any example script?
Non-public Extensions#
Scripts from the subfolder examples/external_dependencies/ require access to
git repositories (URDF files or optional dependencies) and datasets that are
not publicly available. They are available on request (email
alexander.fabisch@dfki.de).
Note that the library does not have any non-public dependencies! They are only required to run all examples.
MoCap Library#
# untested: pip install git+https://git.hb.dfki.de/dfki-interaction/mocap.git
git clone git@git.hb.dfki.de:dfki-interaction/mocap.git
cd mocap
python -m pip install -e .
cd ..
Get URDFs#
# RH5
git clone git@git.hb.dfki.de:models-robots/rh5_models/pybullet-only-arms-urdf.git --recursive
# RH5v2
git clone git@git.hb.dfki.de:models-robots/rh5v2_models/pybullet-urdf.git --recursive
# Kuka
git clone git@git.hb.dfki.de:models-robots/kuka_lbr.git
# Solar panel
git clone git@git.hb.dfki.de:models-objects/solar_panels.git
# RH5 Gripper
git clone git@git.hb.dfki.de:motto/abstract-urdf-gripper.git --recursive
Data#
I assume that your data is located in the folder data/ in most scripts.
You should put a symlink there to point to your actual data folder.
Citation#
If you use movement_primitives for a scientific publication, I would
appreciate citation of the following paper:
Fabisch, A., (2024). movement_primitives: Imitation Learning of Cartesian
Motion with Movement Primitives. Journal of Open Source Software, 9(97), 6695,
Bibtex entry:
@article{Fabisch2024,
doi = {10.21105/joss.06695},
url = {https://doi.org/10.21105/joss.06695},
year = {2024},
publisher = {The Open Journal},
volume = {9},
number = {97},
pages = {6695},
author = {Alexander Fabisch},
title = {movement_primitives: Imitation Learning of Cartesian Motion with Movement Primitives},
journal = {Journal of Open Source Software}
}
Funding#
This library has been developed initially at the Robotics Innovation Center of the German Research Center for Artificial Intelligence (DFKI GmbH) in Bremen. At this phase the work was supported through a grant of the German Federal Ministry of Economic Affairs and Energy (BMWi, FKZ 50 RA 1701).
![]()
![]()