pytransform3d.rotations.active_matrix_from_extrinsic_euler_xyz#
- pytransform3d.rotations.active_matrix_from_extrinsic_euler_xyz(e)[source]#
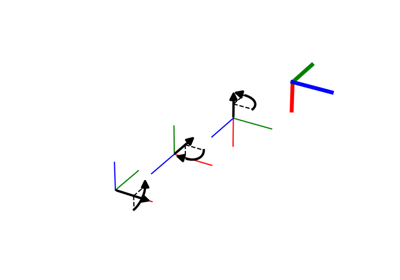
Compute active rotation matrix from extrinsic xyz Cardan angles.
- Parameters:
- earray-like, shape (3,)
Angles for rotation around x-, y-, and z-axes (extrinsic rotations)
- Returns:
- Rarray, shape (3, 3)
Rotation matrix