Transformation Ambiguities and Conventions¶
Heterogenous software systems that consist of proprietary and open source software are often combined when we work with transformations. For example, suppose you want to transfer a trajectory demonstrated by a human to a robot. The human trajectory could be measured from an RGB-D camera, fused with IMU sensors that are attached to the human, and then translated to joint angles by inverse kinematics. That involves at least three different software systems that might all use different conventions for transformations. Sometimes even one software uses more than one convention. The following aspects are of crucial importance to glue and debug transformations in systems with heterogenous and often incompatible software:
Compatibility: Compatibility between heterogenous softwares is a difficult topic. It might involve, for example, communicating between proprietary and open source software or different languages.
Conventions: Lots of different conventions are used for transformations in three dimensions. These have to be determined or specified.
Conversions: We need conversions between these conventions to communicate transformations between different systems.
Visualization: Finally, transformations should be visually verified and that should be as easy as possible.
pytransform3d assists in solving these issues. This documentation clearly states all of the used conventions, it aims at making conversions between rotation and transformation conventions as easy as possible, it is tightly coupled with Matplotlib to quickly visualize (or animate) transformations and it is written in Python with few dependencies. Python is a widely adopted language. It is used in many domains and supports a wide spectrum of communication to other software.
There are lots of ambiguities in the world of transformations. We try to explain them all here.
Right-handed vs. Left-handed Coordinate System¶
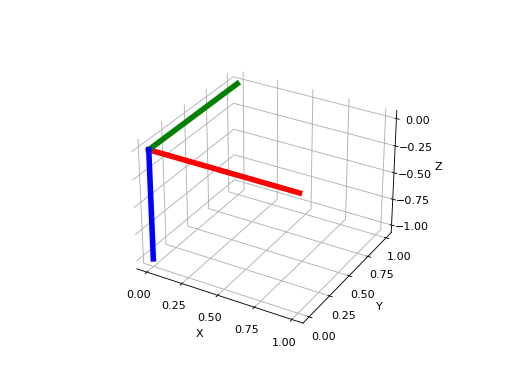
We typically use a right-handed coordinate system, that is, the x-, y- and z-axis are aligned in a specific way. The name comes from the way how the fingers are attached to the human hand. Try to align your thumb with the imaginary x-axis, your index finger with the y-axis, and your middle finger with the z-axis. It is possible to do this with a right hand in a right-handed system and with the left hand in a left-handed system.
| Right-handed | Left-handed |
|---|---|

|
|
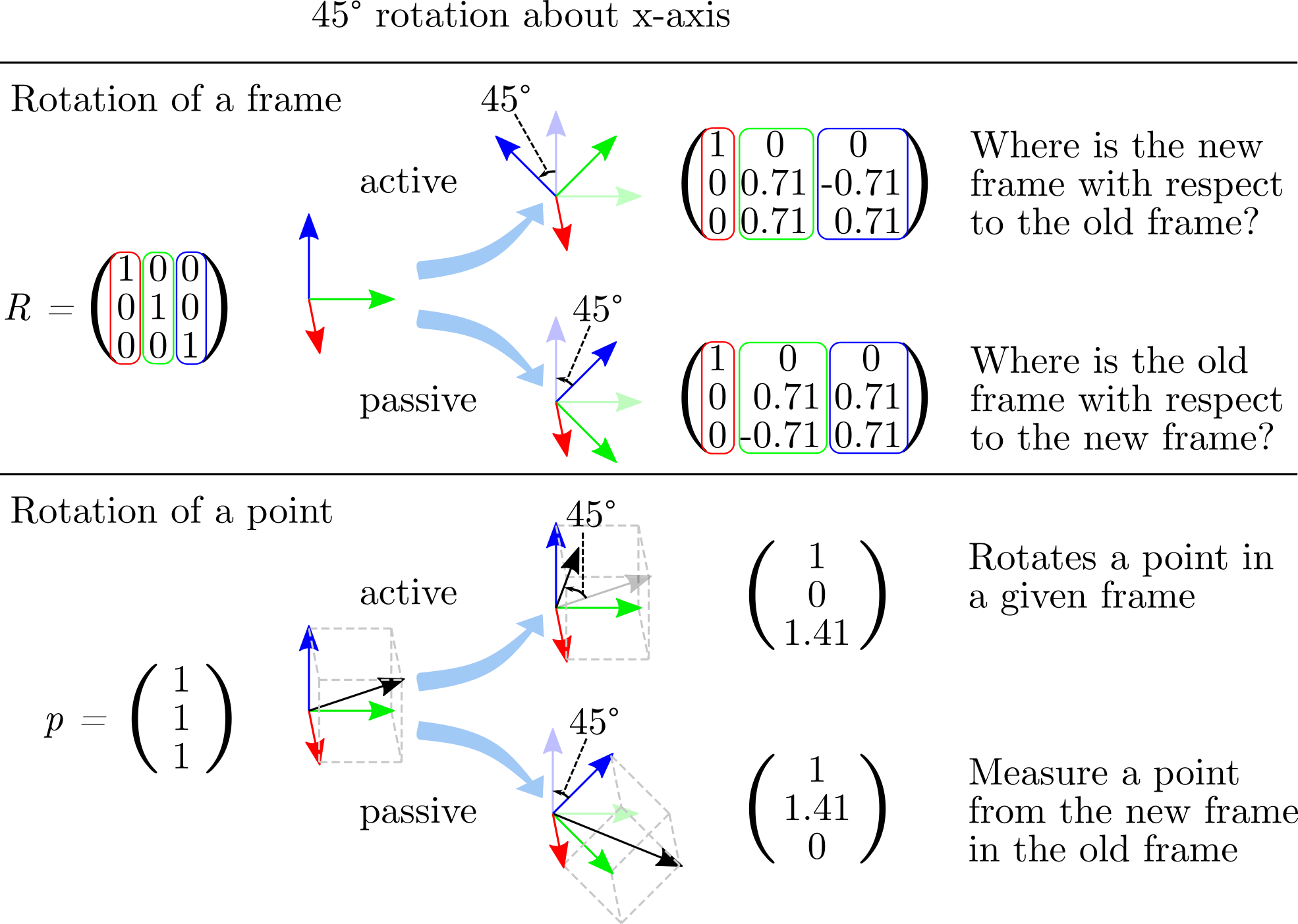
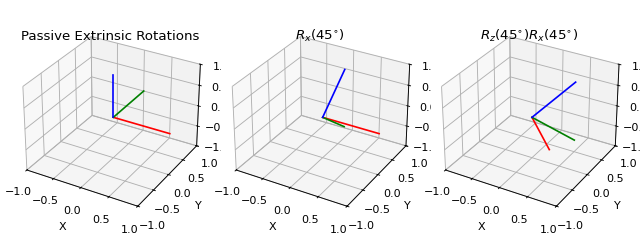
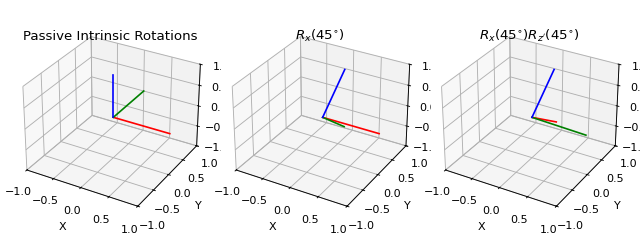
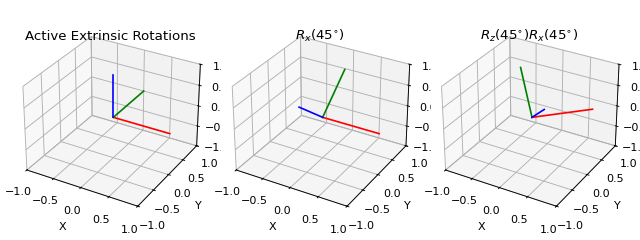
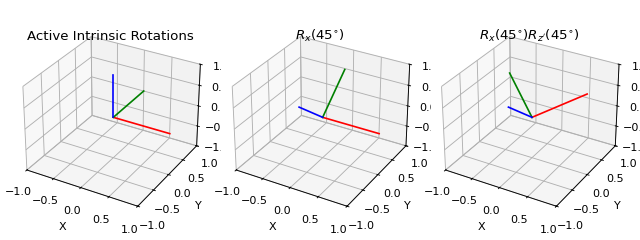
| Active | Passive |
|---|---|
|

|
 about the z-axis, the following
rotation matrix is usually used in an active transformation:
about the z-axis, the following
rotation matrix is usually used in an active transformation: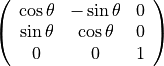
 or
a row vector
or
a row vector  . A rotation matrix
. A rotation matrix  can be used to rotate the point by pre-multiplying it to the column vector
can be used to rotate the point by pre-multiplying it to the column vector
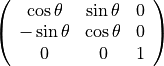
 or by post-multiplying it to the row
vector
or by post-multiplying it to the row
vector  . However, for the same rotation
matrix, both approaches are inverse:
. However, for the same rotation
matrix, both approaches are inverse:
 .
Hence, to achieve the same effect we have to use two different rotation
matrices depending on how we multiply them to points.
.
Hence, to achieve the same effect we have to use two different rotation
matrices depending on how we multiply them to points. and another matrix
and another matrix
 and we want to first rotate by
and we want to first rotate by  . We can also express the second rotation in terms
of a local, body-fixed coordinates (local, body-fixed / intrinsic rotation)
by
. We can also express the second rotation in terms
of a local, body-fixed coordinates (local, body-fixed / intrinsic rotation)
by  , which means
, which means