#include <PathStatistic.hpp>
|
| | PathStatistic (const traversability_generator3d::TraversabilityConfig &config) |
| |
| void | calculateStatistics (const std::vector< const traversability_generator3d::TravGenNode * > &path, const std::vector< base::Pose2D > &poses, const traversability_generator3d::TravMap3d &trMap, const std::string &debugObstacleName=std::string()) |
| |
| bool | isPathFeasible (const std::vector< const traversability_generator3d::TravGenNode * > &path, const std::vector< base::Pose2D > &poses, const traversability_generator3d::TravMap3d &trMap) |
| |
| const Stats & | getRobotStats () const |
| |
| const Stats & | getBoundaryStats () const |
| |
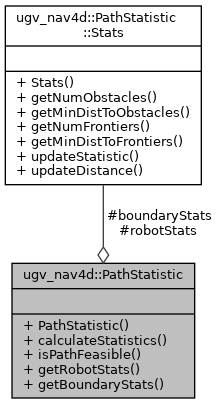
Calculates statistics about different patches encountered while traversing a path. I.e. counts patchtes that the robot will traverase when following a path
◆ PathStatistic()
| ugv_nav4d::PathStatistic::PathStatistic |
( |
const traversability_generator3d::TraversabilityConfig & |
config | ) |
|
◆ calculateStatistics()
| void ugv_nav4d::PathStatistic::calculateStatistics |
( |
const std::vector< const traversability_generator3d::TravGenNode * > & |
path, |
|
|
const std::vector< base::Pose2D > & |
poses, |
|
|
const traversability_generator3d::TravMap3d & |
trMap, |
|
|
const std::string & |
debugObstacleName = std::string() |
|
) |
| |
Accumulates statistics about all patches that are inside a config.costFunctionDist wide corridor around path. This can be used to answer questions such as:
- How many obstacles does the robot traverse when following this path
- How many obstacles are close to the robot (but are not directly traversed) when following this path (boundaryStats.getNumObstacles())
- How many frontiers does the robot traverse when following this path (robotStats.getNumFrontiers())
- Is it safe to follow this path? (robotStats.getNumObstacles() == 0?)
- What is the minimum distance to an obstacle on this path?
- etc.
The statistics are used extensively during planning.
- Parameters
-
| path | List of patches that define the path. |
| poses | List of poses on the path. There should be one pose for each patch. |
| debugObstacleName | optional name of the debug drawing that should be used for this path |
◆ getBoundaryStats()
| const Stats & ugv_nav4d::PathStatistic::getBoundaryStats |
( |
| ) |
const |
|
inline |
◆ getRobotStats()
| const Stats & ugv_nav4d::PathStatistic::getRobotStats |
( |
| ) |
const |
|
inline |
◆ isPathFeasible()
| bool ugv_nav4d::PathStatistic::isPathFeasible |
( |
const std::vector< const traversability_generator3d::TravGenNode * > & |
path, |
|
|
const std::vector< base::Pose2D > & |
poses, |
|
|
const traversability_generator3d::TravMap3d & |
trMap |
|
) |
| |
◆ boundaryStats
| Stats ugv_nav4d::PathStatistic::boundaryStats |
|
protected |
Statistics about patches in the corridor outside the robot bounding box
◆ robotStats
| Stats ugv_nav4d::PathStatistic::robotStats |
|
protected |
Statistics about patches that the robot traverses while following a given path
The documentation for this class was generated from the following files: