#include <PreComputedMotions.hpp>
|
| | Motion (unsigned int numAngles=0) |
| |
◆ Type
| Enumerator |
|---|
| MOV_FORWARD | |
| MOV_BACKWARD | |
| MOV_POINTTURN | |
| MOV_LATERAL | |
◆ Motion()
| ugv_nav4d::Motion::Motion |
( |
unsigned int |
numAngles = 0 | ) |
|
|
inline |
◆ calculateCost()
| int ugv_nav4d::Motion::calculateCost |
( |
double |
translationalDist, |
|
|
double |
angularDist, |
|
|
double |
translationVelocity, |
|
|
double |
angularVelocity, |
|
|
double |
costMultiplier |
|
) |
| |
|
static |
◆ angularDist
| double ugv_nav4d::Motion::angularDist |
◆ baseCost
| int ugv_nav4d::Motion::baseCost |
◆ costMultiplier
| int ugv_nav4d::Motion::costMultiplier |
◆ costScaleFactor
| double ugv_nav4d::Motion::costScaleFactor = 1000.0 |
|
static |
used to scale the costs because costs are int but real costs are most likely small doubles
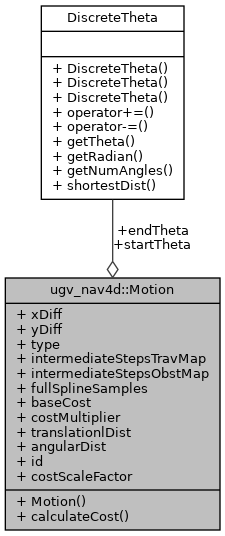
◆ endTheta
◆ fullSplineSamples
This vector contains a full resolution sample of the motion primitive, together with the cell the poses are supposed to be in. Poses are relative to (0/0), while the cellIndex is computed relative to the center of the start cell.
◆ id
| size_t ugv_nav4d::Motion::id |
◆ intermediateStepsTravMap
| std::vector<PoseWithCell> ugv_nav4d::Motion::intermediateStepsTravMap |
the intermediate poses are not discrete. They are relative to the starting cell. The Poses start from (0/0), while the cell idx is computed from the center of the start cell + pose
◆ startTheta
◆ translationlDist
| double ugv_nav4d::Motion::translationlDist |
◆ type
| Type ugv_nav4d::Motion::type |
◆ xDiff
| int ugv_nav4d::Motion::xDiff |
◆ yDiff
| int ugv_nav4d::Motion::yDiff |
The documentation for this class was generated from the following files: