#include <sbpl/discrete_space_information/environment.h>#include <traversability_generator3d/TraversabilityGenerator3d.hpp>#include <maps/grid/TraversabilityMap3d.hpp>#include <base/Pose.hpp>#include "DiscreteTheta.hpp"#include "PreComputedMotions.hpp"#include <trajectory_follower/SubTrajectory.hpp>
Include dependency graph for EnvironmentXYZTheta.hpp:

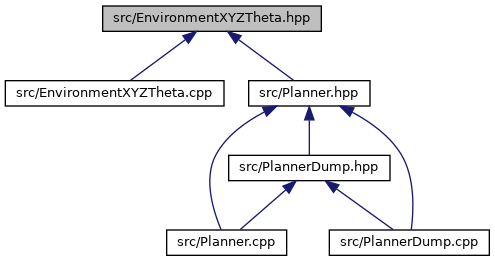
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | ugv_nav4d |
Functions | |
| std::ostream & | operator<< (std::ostream &stream, const DiscreteTheta &angle) |
Function Documentation
◆ operator<<()
| std::ostream & operator<< | ( | std::ostream & | stream, |
| const DiscreteTheta & | angle | ||
| ) |
Here is the call graph for this function:
