Note
Go to the end to download the full example code.
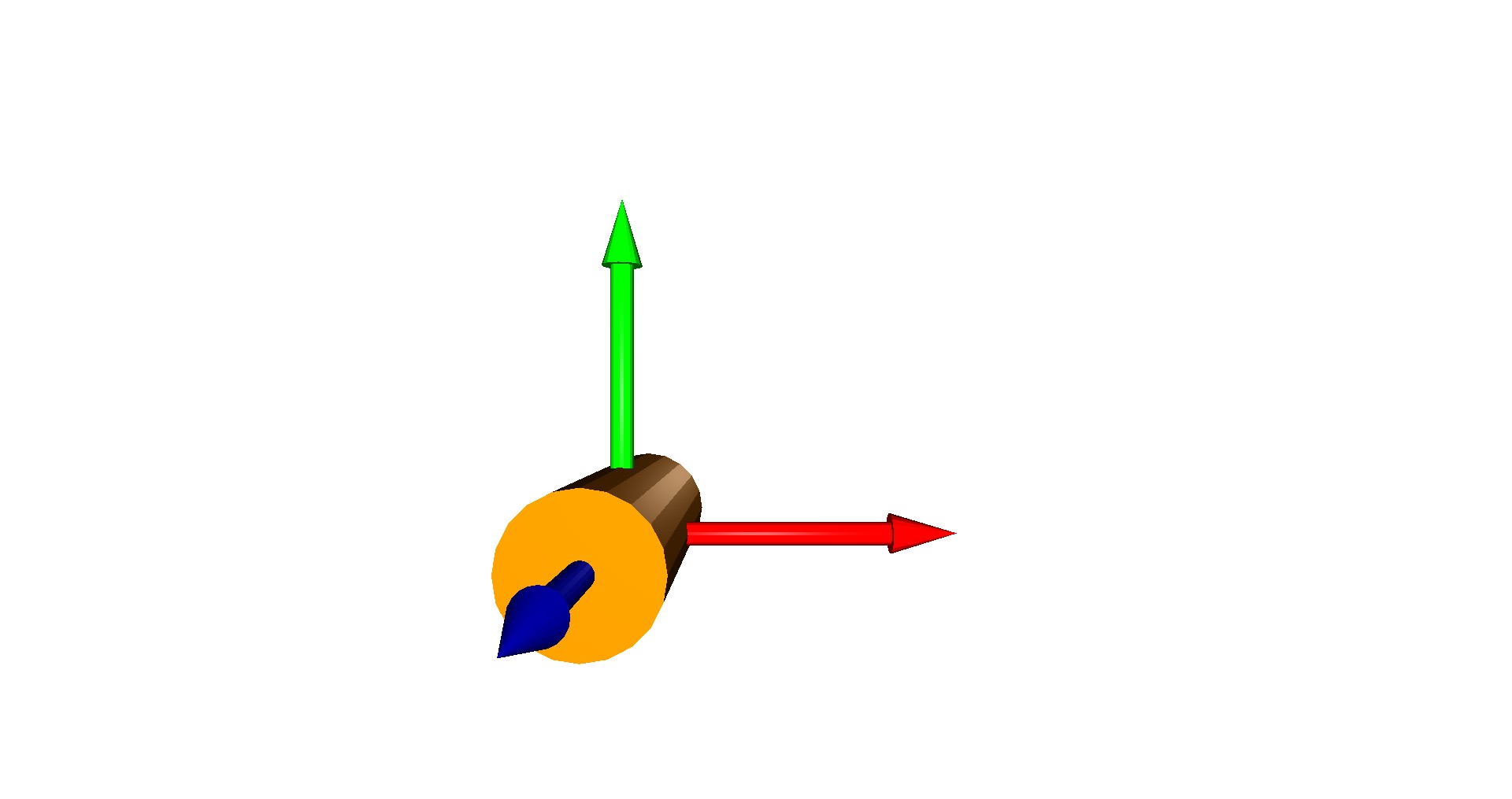
Visualize Cylinder with Wrench#
We apply a constant body-fixed wrench to a cylinder and integrate acceleration to twist and exponential coordinates of transformation to finally compute the new pose of the cylinder.
import numpy as np
import pytransform3d.visualizer as pv
from pytransform3d.transformations import transform_from_exponential_coordinates
def spatial_inertia_of_cylinder(mass, length, radius):
I_xx = I_yy = 0.25 * mass * radius**2 + 1.0 / 12.0 * mass * length**2
I_zz = 0.5 * mass * radius**2
inertia = np.eye(6)
inertia[:3, :3] *= np.array([I_xx, I_yy, I_zz])
inertia[3:, 3:] *= mass
return inertia
def animation_callback(
step, cylinder, cylinder_frame, prev_cylinder2world, Stheta_dot, inertia_inv
):
if step == 0: # Reset cylinder state
prev_cylinder2world[:, :] = np.eye(4)
Stheta_dot[:] = 0.0
# Apply constant wrench
wrench_in_cylinder = np.array([0.1, 0.001, 0.001, 0.01, 1.0, 1.0])
dt = 0.0005
Stheta_ddot = np.dot(inertia_inv, wrench_in_cylinder)
Stheta_dot += dt * Stheta_ddot
cylinder2world = transform_from_exponential_coordinates(
dt * Stheta_dot
).dot(prev_cylinder2world)
# Update visualization
cylinder_frame.set_data(cylinder2world)
cylinder.set_data(cylinder2world)
prev_cylinder2world[:, :] = cylinder2world
return cylinder_frame, cylinder
fig = pv.figure()
# Definition of cylinder
mass = 1.0
length = 0.5
radius = 0.1
inertia_inv = np.linalg.inv(
spatial_inertia_of_cylinder(mass=mass, length=length, radius=radius)
)
# State of cylinder
cylinder2world = np.eye(4)
twist = np.zeros(6)
cylinder = fig.plot_cylinder(length=length, radius=radius, c=[1, 0.5, 0])
cylinder_frame = fig.plot_transform(A2B=cylinder2world, s=0.5)
fig.plot_transform(A2B=np.eye(4), s=0.5)
fig.view_init()
if "__file__" in globals():
fig.animate(
animation_callback,
n_frames=10000,
fargs=(cylinder, cylinder_frame, cylinder2world, twist, inertia_inv),
loop=True,
)
fig.show()
else:
fig.save_image("__open3d_rendered_image.jpg")
Total running time of the script: (0 minutes 0.192 seconds)