pytransform3d.visualizer.Figure#
- class pytransform3d.visualizer.Figure(window_name='Open3D', width=1920, height=1080, with_key_callbacks=False)[source]#
Bases:
objectThe top level container for all the plot elements.
You can close the visualizer with the keys escape or q.
- Parameters:
- window_namestr, optional (default: Open3D)
Window title name.
- widthint, optional (default: 1920)
Width of the window.
- heightint, optional (default: 1080)
Height of the window.
- with_key_callbacksbool, optional (default: False)
Creates a visualizer that allows to register callbacks for keys.
Methods
__init__([window_name, width, height, ...])add_geometry(geometry)Add geometry to visualizer.
animate(callback, n_frames[, loop, fargs])Make animation with callback.
plot(P[, c])Plot line.
plot_basis([R, p, s, strict_check])Plot basis.
plot_box([size, A2B, c])Plot box.
plot_camera(M[, cam2world, ...])Plot camera in world coordinates.
plot_capsule([height, radius, A2B, ...])Plot capsule.
plot_cone([height, radius, A2B, resolution, c])Plot cone.
plot_cylinder([length, radius, A2B, ...])Plot cylinder.
plot_ellipsoid([radii, A2B, resolution, c])Plot ellipsoid.
plot_graph(tm, frame[, show_frames, ...])Plot graph of connected frames.
plot_mesh(filename[, A2B, s, c])Plot mesh.
plot_plane([normal, d, point_in_plane, s, c])Plot plane.
plot_sphere([radius, A2B, resolution, c])Plot sphere.
plot_trajectory(P[, n_frames, s, c])Trajectory of poses.
plot_transform([A2B, s, name, strict_check])Plot coordinate frame.
plot_vector([start, direction, c])Plot vector.
remove_artist(artist)Remove artist from visualizer.
save_image(filename)Save rendered image to file.
scatter(P[, s, c])Plot collection of points.
set_line_width(line_width)Set render option line width.
set_zoom(zoom)Set zoom.
show()Display the figure window.
update_geometry(geometry)Indicate that geometry has been updated.
view_init([azim, elev])Set the elevation and azimuth of the axes.
- add_geometry(geometry)[source]#
Add geometry to visualizer.
- Parameters:
- geometryGeometry
Open3D geometry.
- update_geometry(geometry)[source]#
Indicate that geometry has been updated.
- Parameters:
- geometryGeometry
Open3D geometry.
- remove_artist(artist)[source]#
Remove artist from visualizer.
- Parameters:
- artistArtist
Artist that should be removed from this figure.
- set_line_width(line_width)[source]#
Set render option line width.
Note: this feature does not work in Open3D’s visualizer at the moment.
- Parameters:
- line_widthfloat
Line width.
- animate(callback, n_frames, loop=False, fargs=())[source]#
Make animation with callback.
- Parameters:
- callbackcallable
Callback that will be called in a loop to update geometries. The first input of the function will be the current frame index from [0, n_frames). Further arguments can be given as fargs. The function should return one artist object or a list of artists that have been updated.
- n_framesint
Total number of frames.
- loopbool, optional (default: False)
Run callback in an infinite loop.
- fargslist, optional (default: [])
Arguments that will be passed to the callback.
- Raises:
- RuntimeError
When callback does not return any artists
- view_init(azim=-60, elev=30)[source]#
Set the elevation and azimuth of the axes.
- Parameters:
- azimfloat, optional (default: -60)
Azimuth angle in the x,y plane in degrees.
- elevfloat, optional (default: 30)
Elevation angle in the z plane.
- plot(P, c=(0, 0, 0))[source]#
Plot line.
- Parameters:
- Parray-like, shape (n_points, 3)
Points of which the line consists.
- carray-like, shape (n_points - 1, 3) or (3,), optional (default: black)
Color can be given as individual colors per line segment or as one color for each segment. A color is represented by 3 values between 0 and 1 indicate representing red, green, and blue respectively.
- Returns:
- lineLine3D
New line.
- scatter(P, s=0.05, c=None)[source]#
Plot collection of points.
- Parameters:
- Parray, shape (n_points, 3)
Points
- sfloat, optional (default: 0.05)
Scaling of the spheres that will be drawn.
- carray-like, shape (3,) or (n_points, 3), optional (default: black)
A color is represented by 3 values between 0 and 1 indicate representing red, green, and blue respectively.
- Returns:
- point_collectionPointCollection3D
New point collection.
- plot_vector(start=array([0., 0., 0.]), direction=array([1, 0, 0]), c=(0, 0, 0))[source]#
Plot vector.
- Parameters:
- startarray-like, shape (3,), optional (default: [0, 0, 0])
Start of the vector
- directionarray-like, shape (3,), optional (default: [1, 0, 0])
Direction of the vector
- carray-like, shape (3,), optional (default: black)
A color is represented by 3 values between 0 and 1 indicate representing red, green, and blue respectively.
- Returns:
- vectorVector3D
New vector.
- plot_basis(R=None, p=array([0., 0., 0.]), s=1.0, strict_check=True)[source]#
Plot basis.
- Parameters:
- Rarray-like, shape (3, 3), optional (default: I)
Rotation matrix, each column contains a basis vector
- parray-like, shape (3,), optional (default: [0, 0, 0])
Offset from the origin
- sfloat, optional (default: 1)
Scaling of the frame that will be drawn
- strict_checkbool, optional (default: True)
Raise a ValueError if the rotation matrix is not numerically close enough to a real rotation matrix. Otherwise we print a warning.
- Returns:
- Frameframe
New frame.
- plot_transform(A2B=None, s=1.0, name=None, strict_check=True)[source]#
Plot coordinate frame.
- Parameters:
- A2Barray-like, shape (4, 4)
Transform from frame A to frame B
- sfloat, optional (default: 1)
Length of basis vectors
- namestr, optional (default: None)
Name of the frame
- strict_checkbool, optional (default: True)
Raise a ValueError if the transformation matrix is not numerically close enough to a real transformation matrix. Otherwise we print a warning.
- Returns:
- Frameframe
New frame.
- plot_trajectory(P, n_frames=10, s=1.0, c=(0, 0, 0))[source]#
Trajectory of poses.
- Parameters:
- Parray-like, shape (n_steps, 7), optional (default: None)
Sequence of poses represented by positions and quaternions in the order (x, y, z, w, vx, vy, vz) for each step
- n_framesint, optional (default: 10)
Number of frames that should be plotted to indicate the rotation
- sfloat, optional (default: 1)
Scaling of the frames that will be drawn
- carray-like, shape (3,), optional (default: black)
A color is represented by 3 values between 0 and 1 indicate representing red, green, and blue respectively.
- Returns:
- trajectoryTrajectory
New trajectory.
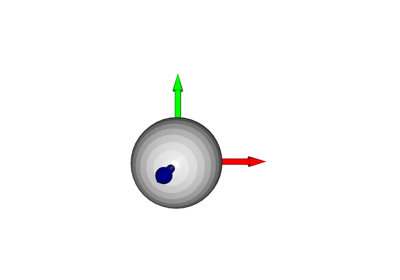
- plot_sphere(radius=1.0, A2B=array([[1., 0., 0., 0.], [0., 1., 0., 0.], [0., 0., 1., 0.], [0., 0., 0., 1.]]), resolution=20, c=None)[source]#
Plot sphere.
- Parameters:
- radiusfloat, optional (default: 1)
Radius of the sphere
- A2Barray-like, shape (4, 4)
Transform from frame A to frame B
- resolutionint, optional (default: 20)
The resolution of the sphere. The longitudes will be split into resolution segments (i.e. there are resolution + 1 latitude lines including the north and south pole). The latitudes will be split into 2 * resolution segments (i.e. there are 2 * resolution longitude lines.)
- carray-like, shape (3,), optional (default: None)
Color
- Returns:
- sphereSphere
New sphere.
- plot_box(size=array([1., 1., 1.]), A2B=array([[1., 0., 0., 0.], [0., 1., 0., 0.], [0., 0., 1., 0.], [0., 0., 0., 1.]]), c=None)[source]#
Plot box.
- Parameters:
- sizearray-like, shape (3,), optional (default: [1, 1, 1])
Size of the box per dimension
- A2Barray-like, shape (4, 4), optional (default: I)
Center of the box
- carray-like, shape (3,), optional (default: None)
Color
- Returns:
- boxBox
New box.
- plot_cylinder(length=2.0, radius=1.0, A2B=array([[1., 0., 0., 0.], [0., 1., 0., 0.], [0., 0., 1., 0.], [0., 0., 0., 1.]]), resolution=20, split=4, c=None)[source]#
Plot cylinder.
- Parameters:
- lengthfloat, optional (default: 1)
Length of the cylinder.
- radiusfloat, optional (default: 1)
Radius of the cylinder.
- A2Barray-like, shape (4, 4)
Pose of the cylinder. The position corresponds to the center of the line segment and the z-axis to the direction of the line segment.
- resolutionint, optional (default: 20)
The circle will be split into resolution segments
- splitint, optional (default: 4)
The height will be split into split segments
- carray-like, shape (3,), optional (default: None)
Color
- Returns:
- cylinderCylinder
New cylinder.
- plot_mesh(filename, A2B=array([[1., 0., 0., 0.], [0., 1., 0., 0.], [0., 0., 1., 0.], [0., 0., 0., 1.]]), s=array([1., 1., 1.]), c=None)[source]#
Plot mesh.
- Parameters:
- filenamestr
Path to mesh file
- A2Barray-like, shape (4, 4)
Center of the mesh
- sarray-like, shape (3,), optional (default: [1, 1, 1])
Scaling of the mesh that will be drawn
- carray-like, shape (n_vertices, 3) or (3,), optional (default: None)
Color(s)
- Returns:
- meshMesh
New mesh.
- plot_ellipsoid(radii=array([1., 1., 1.]), A2B=array([[1., 0., 0., 0.], [0., 1., 0., 0.], [0., 0., 1., 0.], [0., 0., 0., 1.]]), resolution=20, c=None)[source]#
Plot ellipsoid.
- Parameters:
- radiiarray-like, shape (3,)
Radii along the x-axis, y-axis, and z-axis of the ellipsoid.
- A2Barray-like, shape (4, 4)
Transform from frame A to frame B
- resolutionint, optional (default: 20)
The resolution of the ellipsoid. The longitudes will be split into resolution segments (i.e. there are resolution + 1 latitude lines including the north and south pole). The latitudes will be split into 2 * resolution segments (i.e. there are 2 * resolution longitude lines.)
- carray-like, shape (3,), optional (default: None)
Color
- Returns:
- ellipsoidEllipsoid
New ellipsoid.
- plot_capsule(height=1, radius=1, A2B=array([[1., 0., 0., 0.], [0., 1., 0., 0.], [0., 0., 1., 0.], [0., 0., 0., 1.]]), resolution=20, c=None)[source]#
Plot capsule.
A capsule is the volume covered by a sphere moving along a line segment.
- Parameters:
- heightfloat, optional (default: 1)
Height of the capsule along its z-axis.
- radiusfloat, optional (default: 1)
Radius of the capsule.
- A2Barray-like, shape (4, 4)
Pose of the capsule. The position corresponds to the center of the line segment and the z-axis to the direction of the line segment.
- resolutionint, optional (default: 20)
The resolution of the capsule. The longitudes will be split into resolution segments (i.e. there are resolution + 1 latitude lines including the north and south pole). The latitudes will be split into 2 * resolution segments (i.e. there are 2 * resolution longitude lines.)
- carray-like, shape (3,), optional (default: None)
Color
- Returns:
- capsuleCapsule
New capsule.
- plot_cone(height=1, radius=1, A2B=array([[1., 0., 0., 0.], [0., 1., 0., 0.], [0., 0., 1., 0.], [0., 0., 0., 1.]]), resolution=20, c=None)[source]#
Plot cone.
- Parameters:
- heightfloat, optional (default: 1)
Height of the cone along its z-axis.
- radiusfloat, optional (default: 1)
Radius of the cone.
- A2Barray-like, shape (4, 4)
Pose of the cone.
- resolutionint, optional (default: 20)
The circle will be split into resolution segments.
- carray-like, shape (3,), optional (default: None)
Color
- Returns:
- coneCone
New cone.
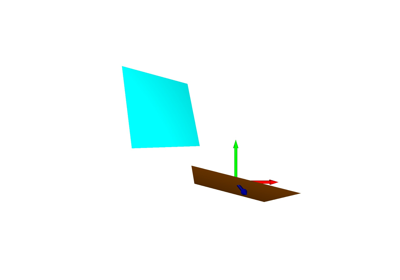
- plot_plane(normal=array([0., 0., 1.]), d=None, point_in_plane=None, s=1.0, c=None)[source]#
Plot plane.
- Parameters:
- normalarray-like, shape (3,), optional (default: [0, 0, 1])
Plane normal.
- dfloat, optional (default: None)
Distance to origin in Hesse normal form.
- point_in_planearray-like, shape (3,), optional (default: None)
Point in plane.
- sfloat, optional (default: 1)
Scaling of the plane that will be drawn.
- carray-like, shape (3,), optional (default: None)
Color.
- Returns:
- planePlane
New plane.
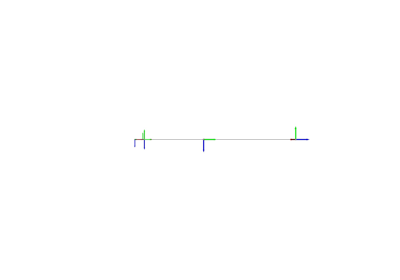
- plot_graph(tm, frame, show_frames=False, show_connections=False, show_visuals=False, show_collision_objects=False, show_name=False, whitelist=None, convex_hull_of_collision_objects=False, s=1.0)[source]#
Plot graph of connected frames.
- Parameters:
- tmTransformManager
Representation of the graph
- framestr
Name of the base frame in which the graph will be displayed
- show_framesbool, optional (default: False)
Show coordinate frames
- show_connectionsbool, optional (default: False)
Draw lines between frames of the graph
- show_visualsbool, optional (default: False)
Show visuals that are stored in the graph
- show_collision_objectsbool, optional (default: False)
Show collision objects that are stored in the graph
- show_namebool, optional (default: False)
Show names of frames
- whitelistlist, optional (default: all)
List of frames that should be displayed
- convex_hull_of_collision_objectsbool, optional (default: False)
Show convex hull of collision objects.
- sfloat, optional (default: 1)
Scaling of the frames that will be drawn
- Returns:
- graphGraph
New graph.
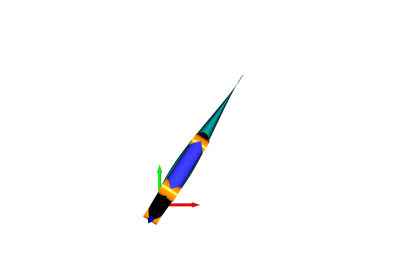
- plot_camera(M, cam2world=None, virtual_image_distance=1, sensor_size=(1920, 1080), strict_check=True)[source]#
Plot camera in world coordinates.
This function is inspired by Blender’s camera visualization. It will show the camera center, a virtual image plane, and the top of the virtual image plane.
- Parameters:
- Marray-like, shape (3, 3)
Intrinsic camera matrix that contains the focal lengths on the diagonal and the center of the the image in the last column. It does not matter whether values are given in meters or pixels as long as the unit is the same as for the sensor size.
- cam2worldarray-like, shape (4, 4), optional (default: I)
Transformation matrix of camera in world frame. We assume that the position is given in meters.
- virtual_image_distancefloat, optional (default: 1)
Distance from pinhole to virtual image plane that will be displayed. We assume that this distance is given in meters. The unit has to be consistent with the unit of the position in cam2world.
- sensor_sizearray-like, shape (2,), optional (default: [1920, 1080])
Size of the image sensor: (width, height). It does not matter whether values are given in meters or pixels as long as the unit is the same as for the sensor size.
- strict_checkbool, optional (default: True)
Raise a ValueError if the transformation matrix is not numerically close enough to a real transformation matrix. Otherwise we print a warning.
- Returns:
- cameraCamera
New camera.