6. Modeling Transformations#
With many transformations it is not easy to keep track of the right sequence. Here are some simple tricks that you can use to keep track of transformations and concatenate them in the correct way.
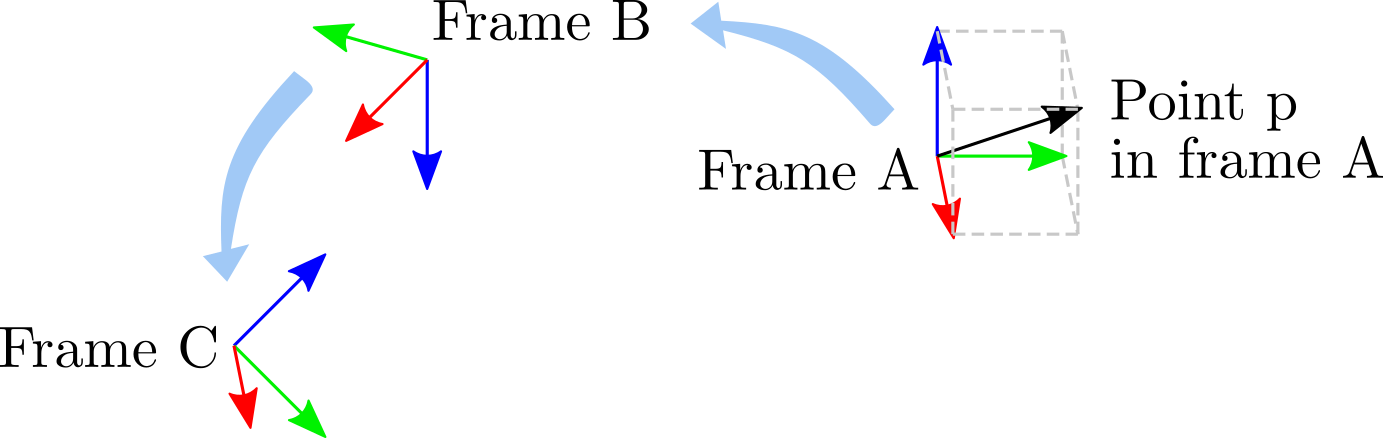
When modeling transformations in mathematical equations we often sequence them from right to left (extrinsic convention). Here it makes most sense to give names like \(\boldsymbol T_{BA}\) for transformations that maps points from frame \(A\) to frame \(B\), so we can easily recognize that
when we read the names of the frames from right to left. Now we can use the transformation matrix \(\boldsymbol T_{CA}\) to transform a point \(_A\boldsymbol{p}\) from frame \(A\) to frame \(C\) by multiplication \(_C\boldsymbol{p} = \boldsymbol{T}_{CA}\,_A\boldsymbol{p}\).
This might look differently in code. Here we should prefer the notation A2B for a transformation from frame A to frame B.
from pytransform3d.transformations import concat
A2B = ... # transformation from frame A to frame B
B2C = ... # transformation from frame B to frame C
A2C = concat(A2B, B2C)
Now we can verify that the new transformation matrix correctly transforms from frame A to frame C if we read from left to right. The function concat will correctly apply the transformation B2C after A2B. If we want to transform a point from C to A we can now use
from pytransform3d.transformations import vector_to_point, transform
p_in_A = vector_to_point(...) # point in frame A
p_in_C = transform(A2C, p_in_A)
This notation is particuarly effective when we use it in combination with
longer, more readable frame names, e.g., left_hand_palm or robot_base.
For more complex cases the TransformManager
can help.