Note
Go to the end to download the full example code.
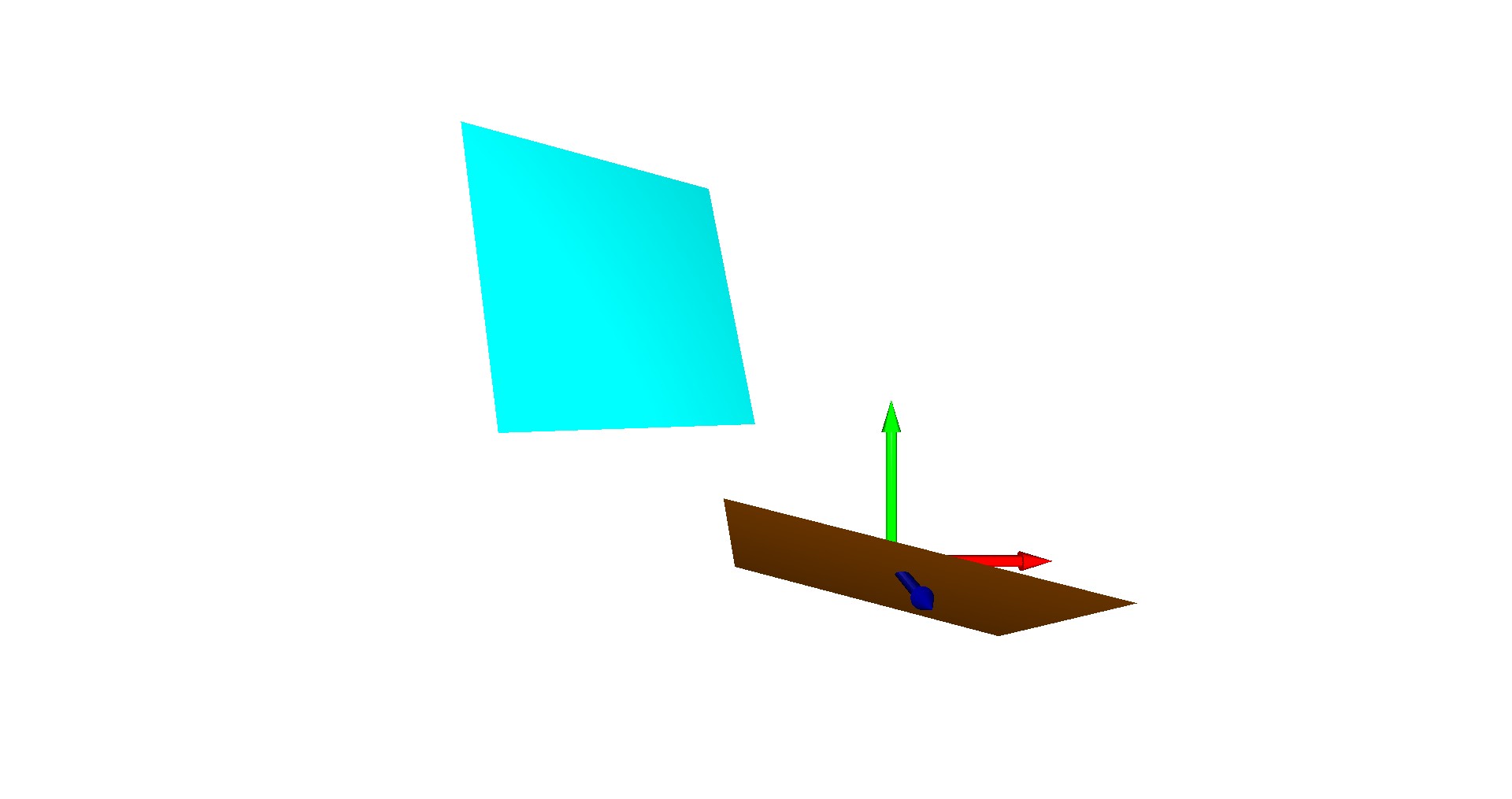
Visualize Plane#
Visualizes one plane in Hesse normal form and one plane defined by point and normal.
import numpy as np
import pytransform3d.rotations as pr
import pytransform3d.visualizer as pv
fig = pv.figure()
fig.plot_transform(np.eye(4))
rng = np.random.default_rng(8853)
fig.plot_plane(
pr.norm_vector(rng.standard_normal(3)), rng.standard_normal(), c=(1, 0.5, 0)
)
fig.plot_plane(
pr.norm_vector(rng.standard_normal(3)),
point_in_plane=rng.standard_normal(3),
c=(0, 1, 1),
)
if "__file__" in globals():
fig.show()
else:
fig.save_image("__open3d_rendered_image.jpg")
Total running time of the script: (0 minutes 0.198 seconds)