Matplotlib Figures#
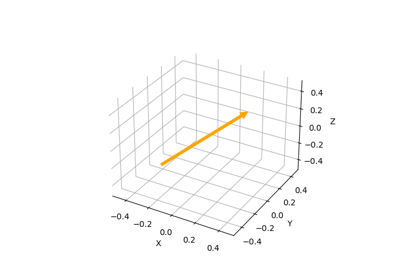
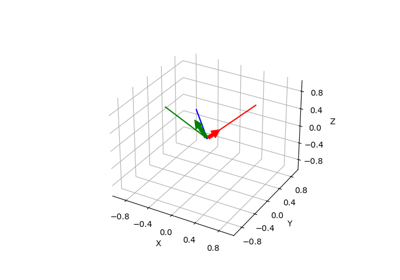
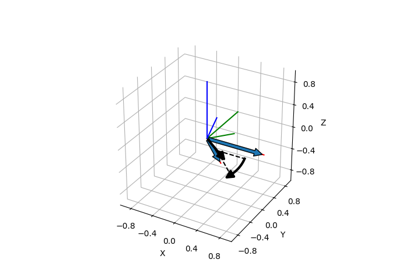
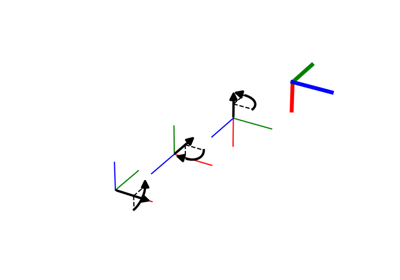
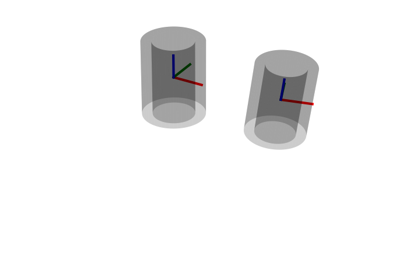
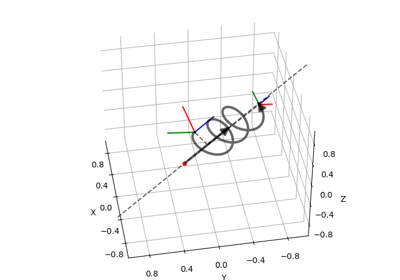
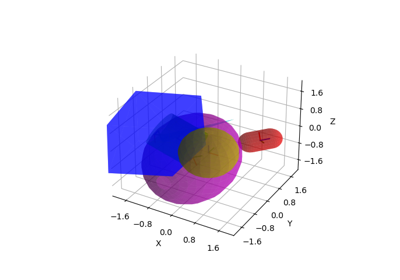
Axis-Angle Representation from Two Direction Vectors
Axis-Angle Representation from Two Direction Vectors
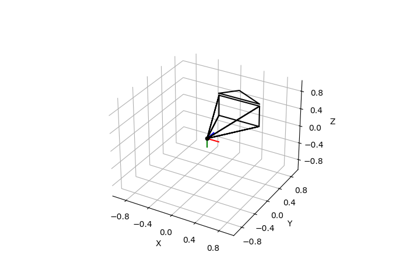
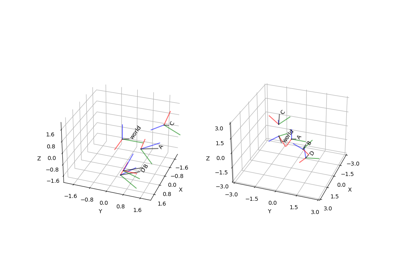
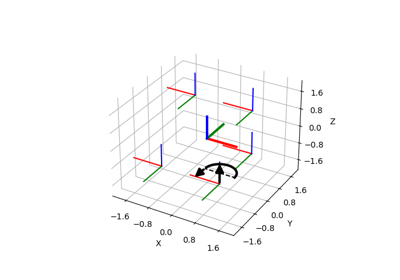


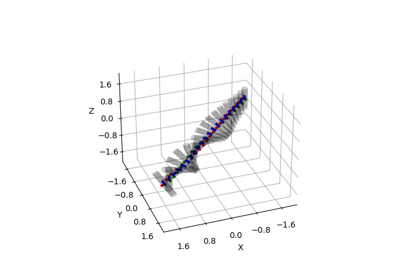

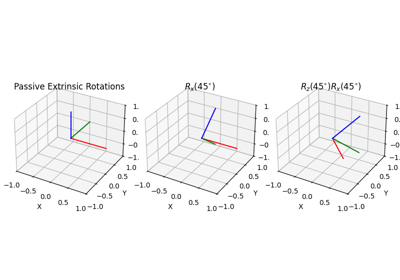
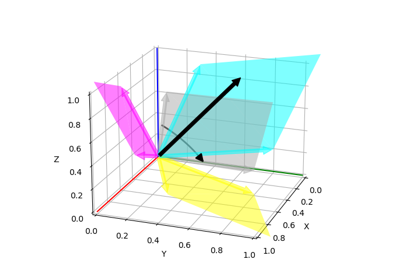
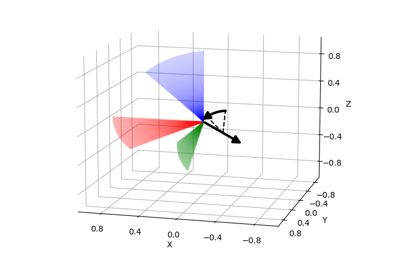
Convention for Rotation: Passive / Active, Extrinsic / Intrinsic
Convention for Rotation: Passive / Active, Extrinsic / Intrinsic