Note
Go to the end to download the full example code.
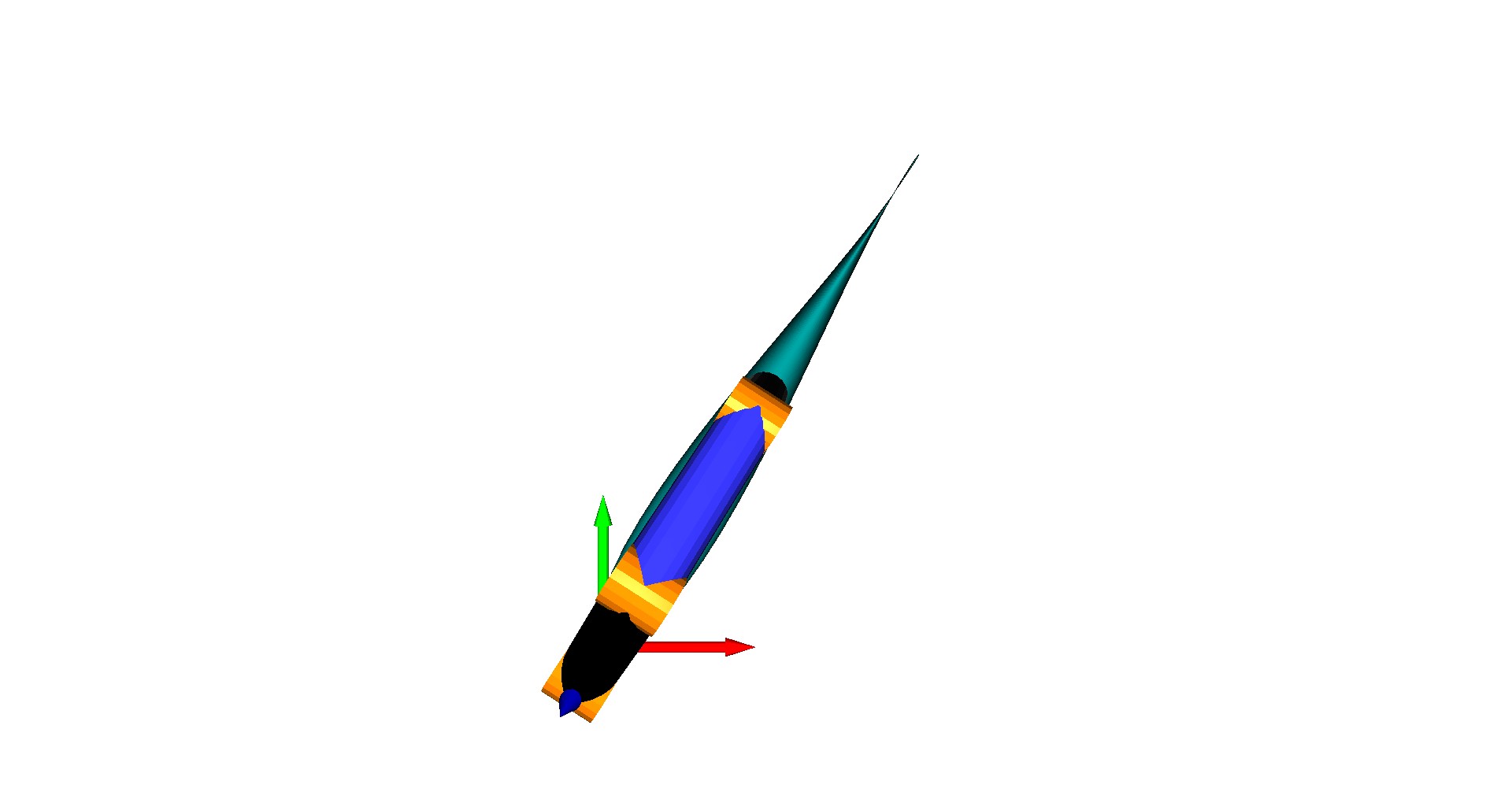
Probabilistic Product of Exponentials#
We compute the probabilistic forward kinematics of a robot with flexible links or joints and visualize the projected equiprobably ellipsoid of the end-effector’s pose distribution.
import os
import numpy as np
import open3d as o3d
from matplotlib import cbook
import pytransform3d.trajectories as ptr
import pytransform3d.transformations as pt
import pytransform3d.uncertainty as pu
import pytransform3d.visualizer as pv
from pytransform3d.urdf import UrdfTransformManager
Probabilistic Robot Kinematics#
The end-effector’s pose distribution is computed based on the Probabilistic Product of Exponentials PPOE [1].
Our ProbabilisticRobotKinematics class is a subclass of
UrdfTransformManager, which loads a description
of a robot from the URDF format.
The complicated part of this example is the conversion of kinematics parameters from URDF data to screw axes that are needed for the product of exponentials formulation of forward kinematics.
Once we have this information, the implementation of the probabilistic product of exponentials is straightforward:
We multiply the screw axis of each joint with the corresponding joint angle to obtain the exponential coordinates of each relative joint displacement.
We concatenate the relative joint displacements and the base pose to obtain the end-effector’s pose. This is the original product of exponentials.
The PPOE modifies the original product of exponentials by transforming and concatenating the covariances of each transformation.
class ProbabilisticRobotKinematics(UrdfTransformManager):
"""Probabilistic robot kinematics.
Parameters
----------
robot_urdf : str
URDF description of robot
ee_frame : str
Name of the end-effector frame
base_frame : str
Name of the base frame
joint_names : list
Names of joints in order from base to end effector
mesh_path : str, optional (default: None)
Path in which we search for meshes that are defined in the URDF.
Meshes will be ignored if it is set to None and no 'package_dir'
is given.
package_dir : str, optional (default: None)
Some URDFs start file names with 'package://' to refer to the ROS
package in which these files (textures, meshes) are located. This
variable defines to which path this prefix will be resolved.
"""
def __init__(
self,
robot_urdf,
ee_frame,
base_frame,
joint_names,
mesh_path=None,
package_dir=None,
):
super(ProbabilisticRobotKinematics, self).__init__(check=False)
self.load_urdf(robot_urdf, mesh_path=mesh_path, package_dir=package_dir)
self.ee2base_home, self.screw_axes_home = self._get_screw_axes(
ee_frame, base_frame, joint_names
)
self.joint_limits = np.array(
[self.get_joint_limits(jn) for jn in joint_names]
)
def _get_screw_axes(self, ee_frame, base_frame, joint_names):
"""Get screw axes of joints in space frame at robot's home position.
Parameters
----------
ee_frame : str
Name of the end-effector frame
base_frame : str
Name of the base frame
joint_names : list
Names of joints in order from base to end effector
Returns
-------
ee2base_home : array, shape (4, 4)
The home configuration (position and orientation) of the
end-effector.
screw_axes_home : array, shape (n_joints, 6)
The joint screw axes in the space frame when the manipulator is at
the home position.
"""
ee2base_home = self.get_transform(ee_frame, base_frame)
screw_axes_home = []
for jn in joint_names:
ln, _, _, s_axis, limits, joint_type = self._joints[jn]
link2base = self.get_transform(ln, base_frame)
s_axis = np.dot(link2base[:3, :3], s_axis)
q = link2base[:3, 3]
if joint_type == "revolute":
h = 0.0
elif joint_type == "prismatic":
h = np.inf
else:
raise NotImplementedError(
"Joint type %s not supported." % joint_type
)
screw_axis = pt.screw_axis_from_screw_parameters(q, s_axis, h)
screw_axes_home.append(screw_axis)
screw_axes_home = np.row_stack(screw_axes_home)
return ee2base_home, screw_axes_home
def probabilistic_forward_kinematics(self, thetas, covs):
"""Compute probabilistic forward kinematics.
This is based on the probabilistic product of exponentials.
Parameters
----------
thetas : array, shape (n_joints,)
A list of joint coordinates.
covs : array, shape (n_joints, 6, 6)
Covariances of joint transformations.
Returns
-------
ee2base : array, shape (4, 4)
A homogeneous transformation matrix representing the end-effector
frame when the joints are at the specified coordinates.
cov : array, shape (6, 6)
Covariance of the pose in tangent space.
"""
assert len(thetas) == self.screw_axes_home.shape[0]
thetas = np.clip(
thetas, self.joint_limits[:, 0], self.joint_limits[:, 1]
)
Sthetas = self.screw_axes_home * thetas[:, np.newaxis]
joint_displacements = ptr.transforms_from_exponential_coordinates(
Sthetas
)
T = np.eye(4)
cov = np.zeros((6, 6))
for i in range(len(thetas)):
T, cov = pu.concat_locally_uncertain_transforms(
joint_displacements[i], T, covs[i], cov
)
T = T.dot(self.ee2base_home)
ad = pt.adjoint_from_transform(self.ee2base_home)
cov = ad.dot(cov).dot(ad.T)
return T, cov
Mesh Visualization#
To visualize the 6D covariance in the tangent space of SE(3), we project its equiprobable hyper-ellipsoid to 3D and represent it as a mesh. We can then visualize the mesh with this class.
class Surface(pv.Artist):
"""Surface to be visualized with Open3D.
Parameters
----------
x : array, shape (n_steps, n_steps)
Coordinates on x-axis of grid on surface.
y : array, shape (n_steps, n_steps)
Coordinates on y-axis of grid on surface.
z : array, shape (n_steps, n_steps)
Coordinates on z-axis of grid on surface.
c : array-like, shape (3,), optional (default: None)
Color
"""
def __init__(self, x, y, z, c=None):
self.c = c
self.mesh = o3d.geometry.TriangleMesh()
self.set_data(x, y, z)
def set_data(self, x, y, z):
"""Update data.
Parameters
----------
x : array, shape (n_steps, n_steps)
Coordinates on x-axis of grid on surface.
y : array, shape (n_steps, n_steps)
Coordinates on y-axis of grid on surface.
z : array, shape (n_steps, n_steps)
Coordinates on z-axis of grid on surface.
"""
polys = np.stack(
[cbook._array_patch_perimeters(a, 1, 1) for a in (x, y, z)], axis=-1
)
vertices = polys.reshape(-1, 3)
triangles = (
[[4 * i + 0, 4 * i + 1, 4 * i + 2] for i in range(len(polys))]
+ [[4 * i + 2, 4 * i + 3, 4 * i + 0] for i in range(len(polys))]
+ [[4 * i + 0, 4 * i + 3, 4 * i + 2] for i in range(len(polys))]
+ [[4 * i + 2, 4 * i + 1, 4 * i + 0] for i in range(len(polys))]
)
self.mesh.vertices = o3d.utility.Vector3dVector(vertices)
self.mesh.triangles = o3d.utility.Vector3iVector(triangles)
if self.c is not None:
self.mesh.paint_uniform_color(self.c)
self.mesh.compute_vertex_normals()
@property
def geometries(self):
"""Expose geometries.
Returns
-------
geometries : list
List of geometries that can be added to the visualizer.
"""
return [self.mesh]
Then we define a callback to animate the visualization.
def animation_callback(
step, n_frames, tm, graph, joint_names, thetas, covs, surface
):
angle = 0.5 * np.cos(2.0 * np.pi * (0.5 + step / n_frames))
thetas_t = angle * thetas
for joint_name, value in zip(joint_names, thetas_t):
tm.set_joint(joint_name, value)
graph.set_data()
T, cov = tm.probabilistic_forward_kinematics(thetas_t, covs)
x, y, z = pu.to_projected_ellipsoid(T, cov, factor=1, n_steps=50)
surface.set_data(x, y, z)
return graph, surface
Setup#
We load the URDF file,
BASE_DIR = "test/test_data/"
data_dir = BASE_DIR
search_path = "."
while (
not os.path.exists(data_dir)
and os.path.dirname(search_path) != "pytransform3d"
):
search_path = os.path.join(search_path, "..")
data_dir = os.path.join(search_path, BASE_DIR)
filename = os.path.join(data_dir, "robot_with_visuals.urdf")
with open(filename, "r") as f:
robot_urdf = f.read()
define the kinematic chain that we are interested in,
joint_names = ["joint%d" % i for i in range(1, 7)]
tm = ProbabilisticRobotKinematics(
robot_urdf, "tcp", "linkmount", joint_names, mesh_path=data_dir
)
/home/dfki.uni-bremen.de/afabisch/Projekte/pytransform3d/examples/visualizations/vis_probabilistic_robot_kinematics.py:139: DeprecationWarning: `row_stack` alias is deprecated. Use `np.vstack` directly.
screw_axes_home = np.row_stack(screw_axes_home)
define the joint angles,
thetas = np.array([1, 1, 1, 0, 1, 0])
current_thetas = -0.5 * thetas
for joint_name, theta in zip(joint_names, current_thetas):
tm.set_joint(joint_name, theta)
and define the covariances of the joints.
PPOE and Visualization#
Then we can finally use PPOE to compute the end-effector pose and its covariance.
T, cov = tm.probabilistic_forward_kinematics(current_thetas, covs)
We compute the 3D projection of the 6D covariance matrix.
The following code visualizes the result.
fig = pv.figure()
graph = fig.plot_graph(tm, "robot_arm", show_visuals=True)
fig.plot_transform(np.eye(4), s=0.3)
surface = Surface(x, y, z, c=(0, 0.5, 0.5))
surface.add_artist(fig)
fig.view_init(elev=5, azim=50)
n_frames = 200
if "__file__" in globals():
fig.animate(
animation_callback,
n_frames,
loop=True,
fargs=(n_frames, tm, graph, joint_names, thetas, covs, surface),
)
fig.show()
else:
fig.save_image("__open3d_rendered_image.jpg")
References#
Total running time of the script: (0 minutes 0.283 seconds)