pytransform3d.transformations.screw_axis_from_screw_parameters#
- pytransform3d.transformations.screw_axis_from_screw_parameters(q, s_axis, h)[source]#
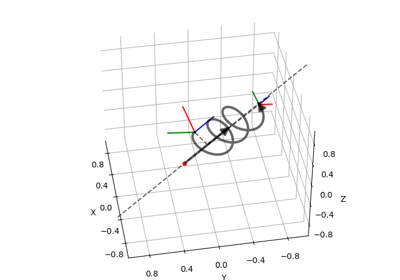
Compute screw axis representation from screw parameters.
- Parameters:
- qarray-like, shape (3,)
Vector to a point on the screw axis
- s_axisarray-like, shape (3,)
Direction vector of the screw axis
- hfloat
Pitch of the screw. The pitch is the ratio of translation and rotation of the screw axis. Infinite pitch indicates pure translation.
- Returns:
- screw_axisarray, shape (6,)
Screw axis described by 6 values (omega_1, omega_2, omega_3, v_1, v_2, v_3), where the first 3 components are related to rotation and the last 3 components are related to translation.