Note
Go to the end to download the full example code.
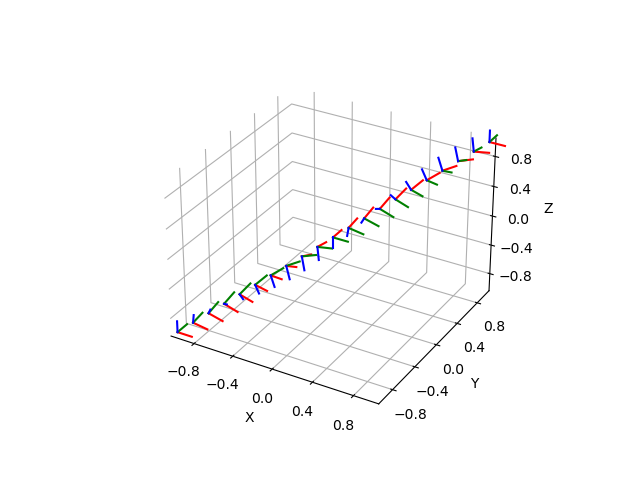
Quaternion Integration#
Integrate angular velocities to a sequence of quaternions.
import matplotlib.pyplot as plt
import numpy as np
from pytransform3d.rotations import (
quaternion_integrate,
matrix_from_quaternion,
plot_basis,
)
angular_velocities = np.empty((21, 3))
angular_velocities[:, :] = np.array([np.sqrt(0.5), np.sqrt(0.5), 0.0])
angular_velocities *= np.pi
Q = quaternion_integrate(angular_velocities, dt=0.1)
ax = None
for t in range(len(Q)):
R = matrix_from_quaternion(Q[t])
p = 2 * (t / (len(Q) - 1) - 0.5) * np.ones(3)
ax = plot_basis(ax=ax, s=0.15, R=R, p=p)
plt.show()
Total running time of the script: (0 minutes 0.068 seconds)