Note
Go to the end to download the full example code.
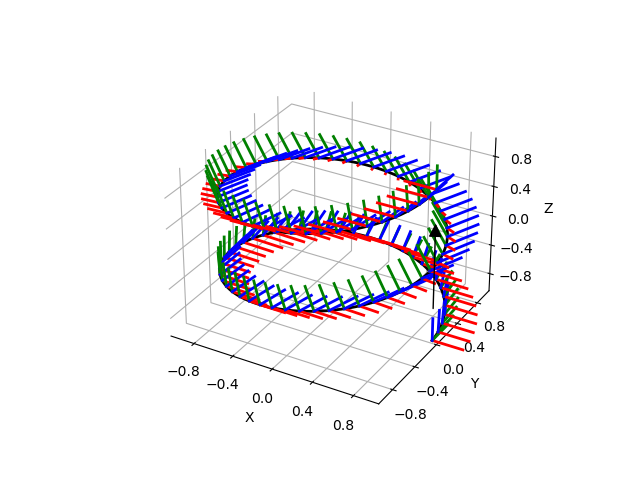
Pose Trajectory#
Plotting pose trajectories with pytransform3d is easy.
import matplotlib.pyplot as plt
import numpy as np
from pytransform3d.batch_rotations import quaternion_slerp_batch
from pytransform3d.rotations import q_id
from pytransform3d.trajectories import plot_trajectory
n_steps = 100000
P = np.empty((n_steps, 7))
P[:, 0] = np.cos(np.linspace(-2 * np.pi, 2 * np.pi, n_steps))
P[:, 1] = np.sin(np.linspace(-2 * np.pi, 2 * np.pi, n_steps))
P[:, 2] = np.linspace(-1, 1, n_steps)
q_end = np.array([0.0, 0.0, np.sqrt(0.5), np.sqrt(0.5)])
P[:, 3:] = quaternion_slerp_batch(q_id, q_end, np.linspace(0, 1, n_steps))
ax = plot_trajectory(
P=P, s=0.3, n_frames=100, normalize_quaternions=False, lw=2, c="k"
)
plt.show()
Total running time of the script: (0 minutes 0.207 seconds)