Note
Go to the end to download the full example code.
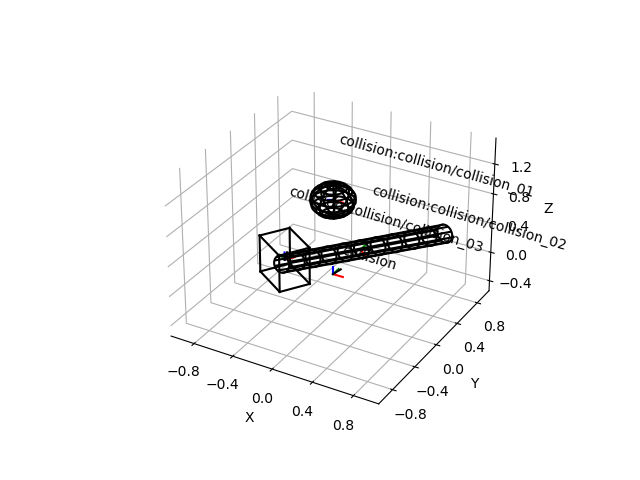
URDF with Collision Objects#
This example shows how to load a URDF description of collision objects and display them.
import matplotlib.pyplot as plt
from pytransform3d.urdf import UrdfTransformManager
URDF = """
<?xml version="1.0"?>
<robot name="collision">
<link name="collision">
<collision name="collision_01">
<origin xyz="0 0 1" rpy="1 0 0"/>
<geometry>
<sphere radius="0.2"/>
</geometry>
</collision>
<collision name="collision_02">
<origin xyz="0 0.5 0" rpy="0 1 0"/>
<geometry>
<cylinder radius="0.1" length="2"/>
</geometry>
</collision>
<collision name="collision_03">
<origin xyz="-0.5 0 0" rpy="0 0 1"/>
<geometry>
<box size="0.3 0.4 0.5"/>
</geometry>
</collision>
</robot>
"""
tm = UrdfTransformManager()
tm.load_urdf(URDF)
ax = tm.plot_frames_in("collision", s=0.1)
tm.plot_collision_objects("collision", ax)
ax.set_zlim((-0.5, 1.5))
plt.show()
Total running time of the script: (0 minutes 0.064 seconds)