Note
Go to the end to download the full example code.
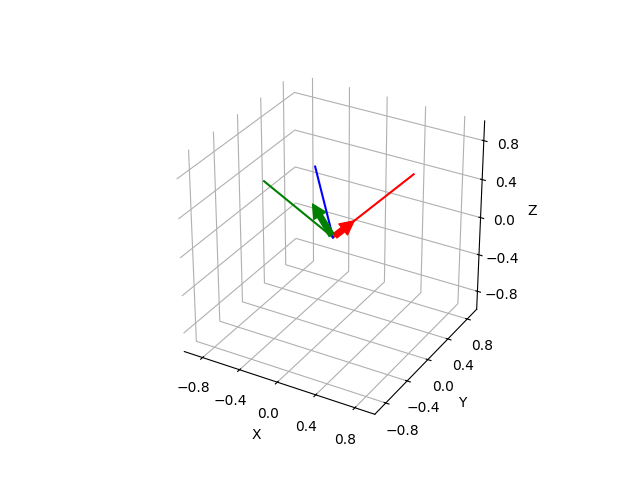
Construct Rotation Matrix from Two Vectors#
We compute rotation matrix from two vectors that form a plane. The x-axis will point in the same direction as the first vector, the y-axis corresponds to the normalized vector rejection of b on a, and the z-axis is the cross product of the other basis vectors.
import matplotlib.pyplot as plt
import numpy as np
from pytransform3d.plot_utils import plot_vector
from pytransform3d.rotations import (
matrix_from_two_vectors,
plot_basis,
random_vector,
)
rng = np.random.default_rng(1)
a = random_vector(rng, 3) * 0.3
b = random_vector(rng, 3) * 0.3
R = matrix_from_two_vectors(a, b)
ax = plot_vector(direction=a, color="r")
plot_vector(ax=ax, direction=b, color="g")
plot_basis(ax=ax, R=R)
plt.show()
Total running time of the script: (0 minutes 0.046 seconds)