Note
Go to the end to download the full example code.
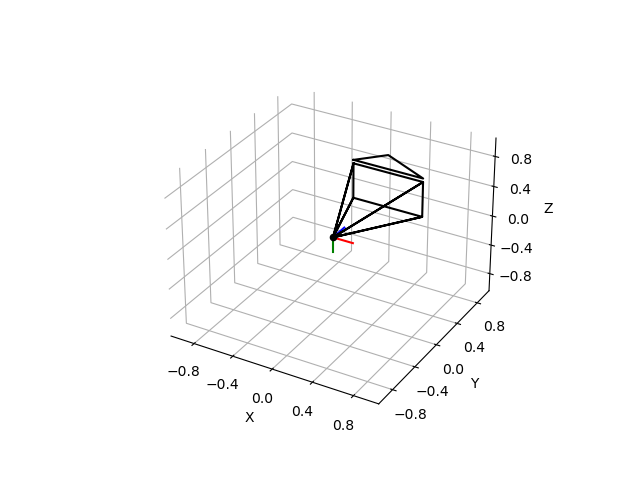
Camera Representation in 3D#
This visualization is inspired by Blender’s camera visualization. It will show the camera center, a virtual image plane at a desired distance to the camera center, and the top direction of the virtual image plane.
import matplotlib.pyplot as plt
import numpy as np
import pytransform3d.camera as pc
import pytransform3d.transformations as pt
cam2world = pt.transform_from_pq([0, 0, 0, np.sqrt(0.5), -np.sqrt(0.5), 0, 0])
# default parameters of a camera in Blender
sensor_size = np.array([0.036, 0.024])
intrinsic_matrix = np.array(
[
[0.05, 0, sensor_size[0] / 2.0],
[0, 0.05, sensor_size[1] / 2.0],
[0, 0, 1],
]
)
virtual_image_distance = 1
ax = pt.plot_transform(A2B=cam2world, s=0.2)
pc.plot_camera(
ax,
cam2world=cam2world,
M=intrinsic_matrix,
sensor_size=sensor_size,
virtual_image_distance=virtual_image_distance,
)
plt.show()
Total running time of the script: (0 minutes 0.051 seconds)