Note
Go to the end to download the full example code.
Convention for Rotation: Passive / Active, Extrinsic / Intrinsic#
We will compare all possible combinations of passive and active rotations and extrinsic and intrinsic concatenation of rotations.
import matplotlib.pyplot as plt
import numpy as np
from mpl_toolkits.mplot3d import proj3d # noqa: F401
from pytransform3d.rotations import (
passive_matrix_from_angle,
active_matrix_from_angle,
plot_basis,
)
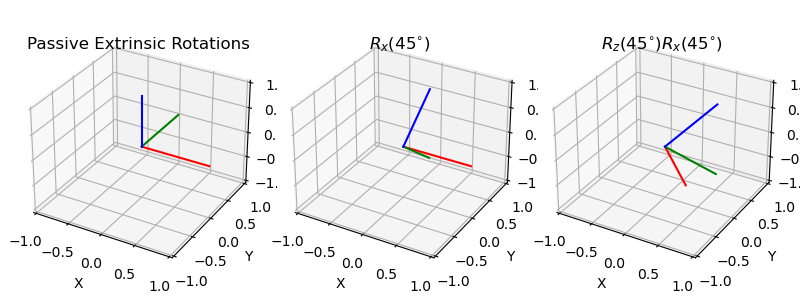
Passive Extrinsic Rotations#
plt.figure(figsize=(8, 3))
axes = [plt.subplot(1, 3, 1 + i, projection="3d") for i in range(3)]
for ax in axes:
plt.setp(
ax,
xlim=(-1, 1),
ylim=(-1, 1),
zlim=(-1, 1),
xlabel="X",
ylabel="Y",
zlabel="Z",
)
Rx45 = passive_matrix_from_angle(0, np.deg2rad(45))
Rz45 = passive_matrix_from_angle(2, np.deg2rad(45))
axes[0].set_title("Passive Extrinsic Rotations", y=0.95)
plot_basis(ax=axes[0], R=np.eye(3))
axes[1].set_title("$R_x(45^{\circ})$", y=0.95)
plot_basis(ax=axes[1], R=Rx45)
axes[2].set_title("$R_z(45^{\circ}) R_x(45^{\circ})$", y=0.95)
plot_basis(ax=axes[2], R=Rz45.dot(Rx45))
plt.tight_layout()
/home/dfki.uni-bremen.de/afabisch/Projekte/pytransform3d/examples/plots/plot_convention_rotation_global_local.py:41: SyntaxWarning: invalid escape sequence '\c'
axes[1].set_title("$R_x(45^{\circ})$", y=0.95)
/home/dfki.uni-bremen.de/afabisch/Projekte/pytransform3d/examples/plots/plot_convention_rotation_global_local.py:43: SyntaxWarning: invalid escape sequence '\c'
axes[2].set_title("$R_z(45^{\circ}) R_x(45^{\circ})$", y=0.95)
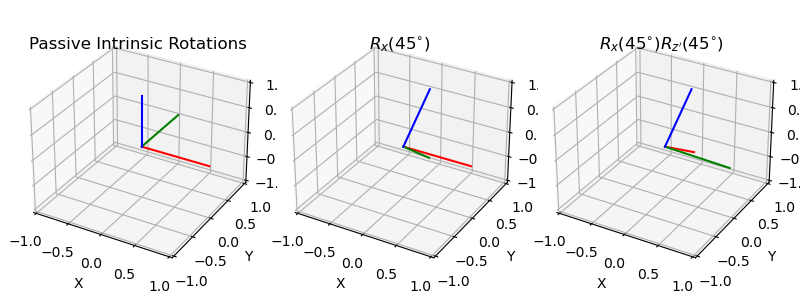
Passive Intrinsic Rotations#
plt.figure(figsize=(8, 3))
axes = [plt.subplot(1, 3, 1 + i, projection="3d") for i in range(3)]
for ax in axes:
plt.setp(
ax,
xlim=(-1, 1),
ylim=(-1, 1),
zlim=(-1, 1),
xlabel="X",
ylabel="Y",
zlabel="Z",
)
axes[0].set_title("Passive Intrinsic Rotations", y=0.95)
plot_basis(ax=axes[0], R=np.eye(3))
axes[1].set_title("$R_x(45^{\circ})$", y=0.95)
plot_basis(ax=axes[1], R=Rx45)
axes[2].set_title("$R_x(45^{\circ}) R_{z'}(45^{\circ})$", y=0.95)
plot_basis(ax=axes[2], R=Rx45.dot(Rz45))
plt.tight_layout()
/home/dfki.uni-bremen.de/afabisch/Projekte/pytransform3d/examples/plots/plot_convention_rotation_global_local.py:66: SyntaxWarning: invalid escape sequence '\c'
axes[1].set_title("$R_x(45^{\circ})$", y=0.95)
/home/dfki.uni-bremen.de/afabisch/Projekte/pytransform3d/examples/plots/plot_convention_rotation_global_local.py:68: SyntaxWarning: invalid escape sequence '\c'
axes[2].set_title("$R_x(45^{\circ}) R_{z'}(45^{\circ})$", y=0.95)
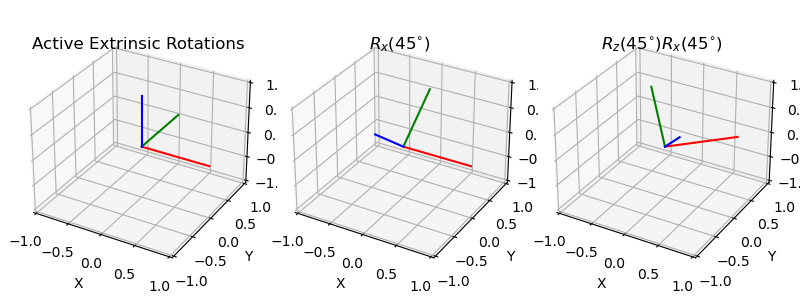
Active Extrinsic Rotations#
plt.figure(figsize=(8, 3))
axes = [plt.subplot(1, 3, 1 + i, projection="3d") for i in range(3)]
for ax in axes:
plt.setp(
ax,
xlim=(-1, 1),
ylim=(-1, 1),
zlim=(-1, 1),
xlabel="X",
ylabel="Y",
zlabel="Z",
)
Rx45 = active_matrix_from_angle(0, np.deg2rad(45))
Rz45 = active_matrix_from_angle(2, np.deg2rad(45))
axes[0].set_title("Active Extrinsic Rotations", y=0.95)
plot_basis(ax=axes[0], R=np.eye(3))
axes[1].set_title("$R_x(45^{\circ})$", y=0.95)
plot_basis(ax=axes[1], R=Rx45)
axes[2].set_title("$R_z(45^{\circ}) R_x(45^{\circ})$", y=0.95)
plot_basis(ax=axes[2], R=Rz45.dot(Rx45))
plt.tight_layout()
/home/dfki.uni-bremen.de/afabisch/Projekte/pytransform3d/examples/plots/plot_convention_rotation_global_local.py:94: SyntaxWarning: invalid escape sequence '\c'
axes[1].set_title("$R_x(45^{\circ})$", y=0.95)
/home/dfki.uni-bremen.de/afabisch/Projekte/pytransform3d/examples/plots/plot_convention_rotation_global_local.py:96: SyntaxWarning: invalid escape sequence '\c'
axes[2].set_title("$R_z(45^{\circ}) R_x(45^{\circ})$", y=0.95)
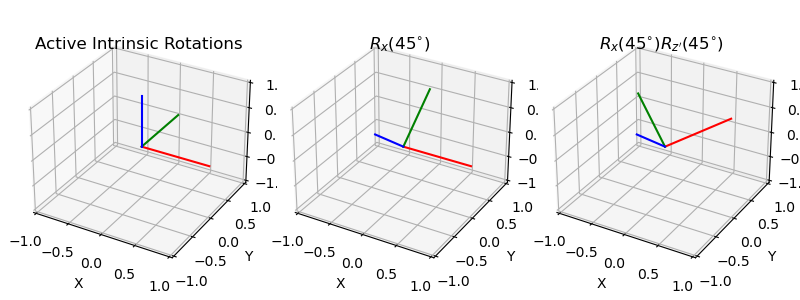
Active Intrinsic Rotations#
plt.figure(figsize=(8, 3))
axes = [plt.subplot(1, 3, 1 + i, projection="3d") for i in range(3)]
for ax in axes:
plt.setp(
ax,
xlim=(-1, 1),
ylim=(-1, 1),
zlim=(-1, 1),
xlabel="X",
ylabel="Y",
zlabel="Z",
)
axes[0].set_title("Active Intrinsic Rotations", y=0.95)
plot_basis(ax=axes[0], R=np.eye(3))
axes[1].set_title("$R_x(45^{\circ})$", y=0.95)
plot_basis(ax=axes[1], R=Rx45)
axes[2].set_title("$R_x(45^{\circ}) R_{z'}(45^{\circ})$", y=0.95)
plot_basis(ax=axes[2], R=Rx45.dot(Rz45))
plt.tight_layout()
plt.show()
/home/dfki.uni-bremen.de/afabisch/Projekte/pytransform3d/examples/plots/plot_convention_rotation_global_local.py:119: SyntaxWarning: invalid escape sequence '\c'
axes[1].set_title("$R_x(45^{\circ})$", y=0.95)
/home/dfki.uni-bremen.de/afabisch/Projekte/pytransform3d/examples/plots/plot_convention_rotation_global_local.py:121: SyntaxWarning: invalid escape sequence '\c'
axes[2].set_title("$R_x(45^{\circ}) R_{z'}(45^{\circ})$", y=0.95)
Total running time of the script: (0 minutes 0.737 seconds)