Note
Go to the end to download the full example code.
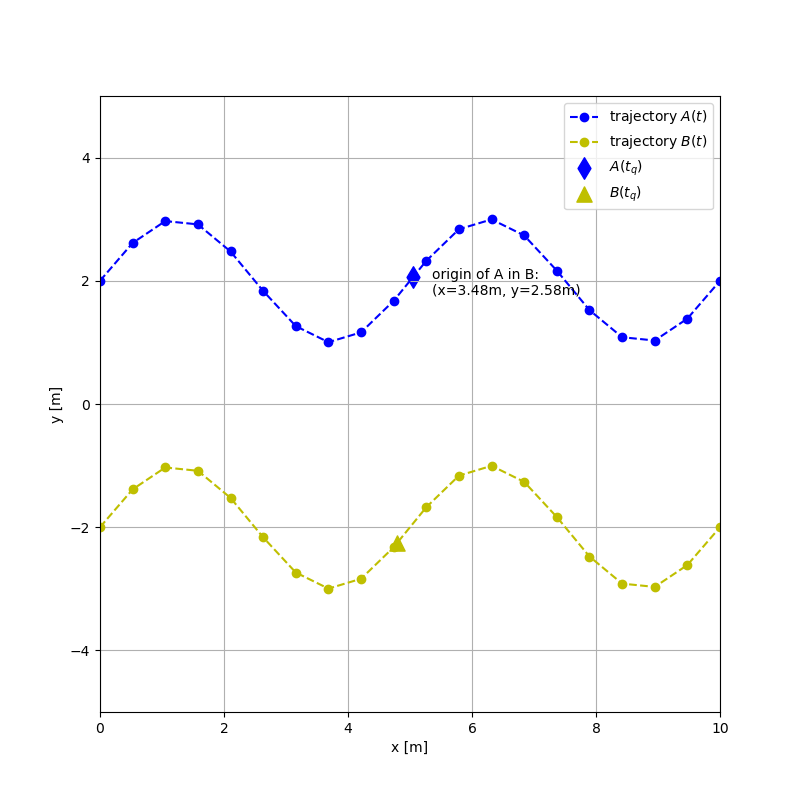
Managing Transformations over Time#
In this example, given two trajectories of 3D rigid transformations, we will interpolate both and use the transform manager for the target timestep.
/home/dfki.uni-bremen.de/afabisch/Projekte/pytransform3d/examples/plots/plot_interpolation_for_transform_manager.py:39: DeprecationWarning: function is deprecated, use matrix_from_euler
R = pr.active_matrix_from_extrinsic_euler_zyx([yaw[i], 0, 0])
import matplotlib.pyplot as plt
import numpy as np
from pytransform3d import rotations as pr
from pytransform3d import transformations as pt
from pytransform3d.transform_manager import (
TemporalTransformManager,
NumpyTimeseriesTransform,
)
def create_sinusoidal_movement(
duration_sec, sample_period, x_velocity, y_start_offset, start_time
):
"""Create a planar (z=0) sinusoidal movement around x-axis."""
time = np.arange(0, duration_sec, sample_period) + start_time
n_steps = len(time)
x = np.linspace(0, x_velocity * duration_sec, n_steps)
spatial_freq = 1.0 / 5.0 # 1 sinus per 5m
omega = 2.0 * np.pi * spatial_freq
y = np.sin(omega * x)
y += y_start_offset
dydx = omega * np.cos(omega * x)
yaw = np.arctan2(dydx, np.ones_like(dydx))
pqs = []
for i in range(n_steps):
R = pr.active_matrix_from_extrinsic_euler_zyx([yaw[i], 0, 0])
T = pt.transform_from(R, [x[i], y[i], 0])
pq = pt.pq_from_transform(T)
pqs.append(pq)
return time, np.array(pqs)
# create entities A and B together with their transformations from world
duration = 10.0 # [s]
sample_period = 0.5 # [s]
velocity_x = 1 # [m/s]
time_A, pqs_A = create_sinusoidal_movement(
duration, sample_period, velocity_x, y_start_offset=2.0, start_time=0.1
)
time_B, pqs_B = create_sinusoidal_movement(
duration, sample_period, velocity_x, y_start_offset=-2.0, start_time=0.35
)
# package them into an instance of `TimeVaryingTransform` abstract class
transform_WA = NumpyTimeseriesTransform(time_A, pqs_A)
transform_WB = NumpyTimeseriesTransform(time_B, pqs_B)
tm = TemporalTransformManager()
tm.add_transform("A", "world", transform_WA)
tm.add_transform("B", "world", transform_WB)
query_time = 4.9 # [s] or an array of times np.array([4.9, 5.2])
A2B_at_query_time = tm.get_transform_at_time("A", "B", query_time)
# transform the origin of A in A (x=0, y=0, z=0) to B
origin_of_A_pos = pt.vector_to_point([0, 0, 0])
origin_of_A_in_B_xyz = pt.transform(A2B_at_query_time, origin_of_A_pos)[:-1]
# for visualization purposes
pq_A = pt.pq_from_transform(transform_WA.as_matrix(query_time))
pq_B = pt.pq_from_transform(transform_WB.as_matrix(query_time))
plt.figure(figsize=(8, 8))
plt.plot(pqs_A[:, 0], pqs_A[:, 1], "bo--", label="trajectory $A(t)$")
plt.plot(pqs_B[:, 0], pqs_B[:, 1], "yo--", label="trajectory $B(t)$")
plt.scatter(pq_A[0], pq_A[1], color="b", s=120, marker="d", label="$A(t_q)$")
plt.scatter(pq_B[0], pq_B[1], color="y", s=120, marker="^", label="$B(t_q)$")
plt.text(
pq_A[0] + 0.3,
pq_A[1] - 0.3,
f"origin of A in B:\n(x={origin_of_A_in_B_xyz[0]:.2f}m,"
+ f" y={origin_of_A_in_B_xyz[1]:.2f}m)",
)
plt.xlabel("x [m]")
plt.ylabel("y [m]")
plt.xlim(0, 10)
plt.ylim(-5, 5)
plt.grid()
plt.legend()
plt.show()
Total running time of the script: (0 minutes 0.077 seconds)