Note
Go to the end to download the full example code.
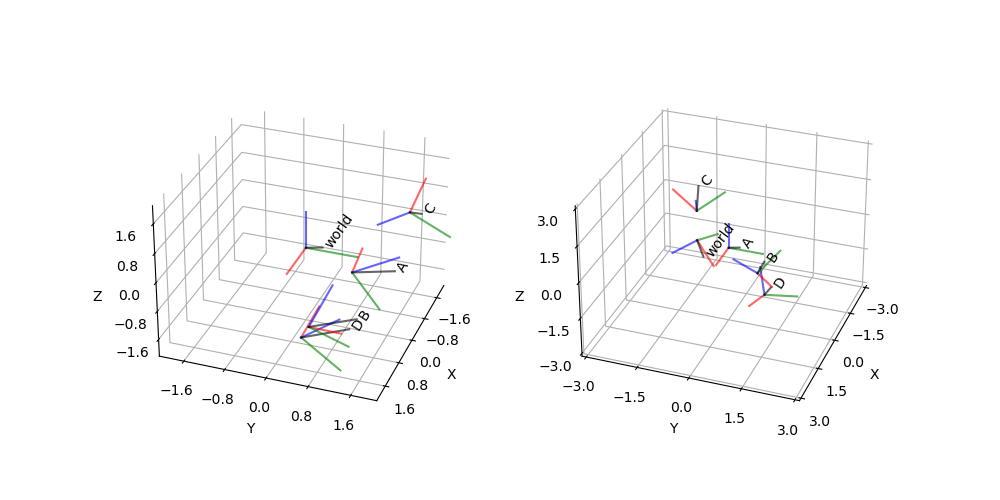
Plot with Respect to Different Reference Frames#
In this example, we will demonstrate how to use the TransformManager. We will add several transforms to the manager and plot all frames in two reference frames (‘world’ and ‘A’).
import matplotlib.pyplot as plt
import numpy as np
from pytransform3d.plot_utils import make_3d_axis
from pytransform3d.transform_manager import TransformManager
from pytransform3d.transformations import random_transform
rng = np.random.default_rng(5)
A2world = random_transform(rng)
B2world = random_transform(rng)
A2C = random_transform(rng)
D2B = random_transform(rng)
tm = TransformManager()
tm.add_transform("A", "world", A2world)
tm.add_transform("B", "world", B2world)
tm.add_transform("A", "C", A2C)
tm.add_transform("D", "B", D2B)
plt.figure(figsize=(10, 5))
ax = make_3d_axis(2, 121)
ax = tm.plot_frames_in("world", ax=ax, alpha=0.6)
ax.view_init(30, 20)
ax = make_3d_axis(3, 122)
ax = tm.plot_frames_in("A", ax=ax, alpha=0.6)
ax.view_init(30, 20)
plt.show()
Total running time of the script: (0 minutes 0.120 seconds)