Note
Go to the end to download the full example code.
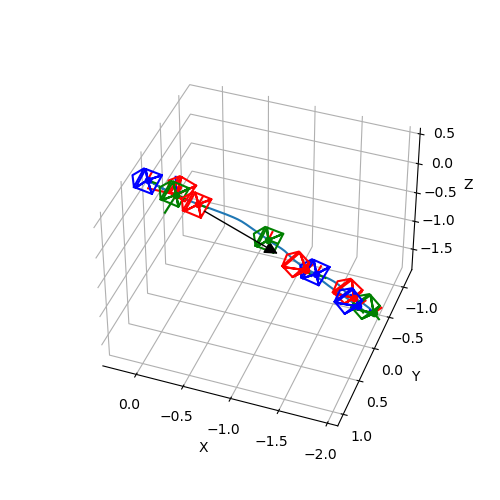
Camera Trajectory#
The following illustration shows a camera’s trajectory that has has been estimated from odometry. This specific trajectory has been used to reconstruct a colored mesh from a depth camera and an RGB camera.
import os
import matplotlib.pyplot as plt
import numpy as np
from cycler import cycle
import pytransform3d.camera as pc
import pytransform3d.rotations as pr
import pytransform3d.trajectories as ptr
import pytransform3d.transformations as pt
BASE_DIR = "test/test_data/"
data_dir = BASE_DIR
search_path = "."
while (
not os.path.exists(data_dir)
and os.path.dirname(search_path) != "pytransform3d"
):
search_path = os.path.join(search_path, "..")
data_dir = os.path.join(search_path, BASE_DIR)
intrinsic_matrix = np.loadtxt(
os.path.join(data_dir, "reconstruction_camera_matrix.csv"), delimiter=","
)
P = np.loadtxt(
os.path.join(data_dir, "reconstruction_odometry.csv"),
delimiter=",",
skiprows=1,
)
for t in range(len(P)):
P[t, 3:] = pr.quaternion_wxyz_from_xyzw(P[t, 3:])
cam2world_trajectory = ptr.transforms_from_pqs(P)
plt.figure(figsize=(5, 5))
ax = pt.plot_transform(s=0.3)
ax = ptr.plot_trajectory(ax, P=P, s=0.1, n_frames=10)
image_size = np.array([1920, 1440])
key_frames_indices = np.linspace(0, len(P) - 1, 10, dtype=int)
colors = cycle("rgb")
for i, c in zip(key_frames_indices, colors):
pc.plot_camera(
ax,
intrinsic_matrix,
cam2world_trajectory[i],
sensor_size=image_size,
virtual_image_distance=0.2,
c=c,
)
pos_min = np.min(P[:, :3], axis=0)
pos_max = np.max(P[:, :3], axis=0)
center = (pos_max + pos_min) / 2.0
max_half_extent = max(pos_max - pos_min) / 2.0
ax.set_xlim((center[0] - max_half_extent, center[0] + max_half_extent))
ax.set_ylim((center[1] - max_half_extent, center[1] + max_half_extent))
ax.set_zlim((center[2] - max_half_extent, center[2] + max_half_extent))
ax.view_init(azim=110, elev=40)
plt.show()
Total running time of the script: (0 minutes 0.083 seconds)