Note
Go to the end to download the full example code.
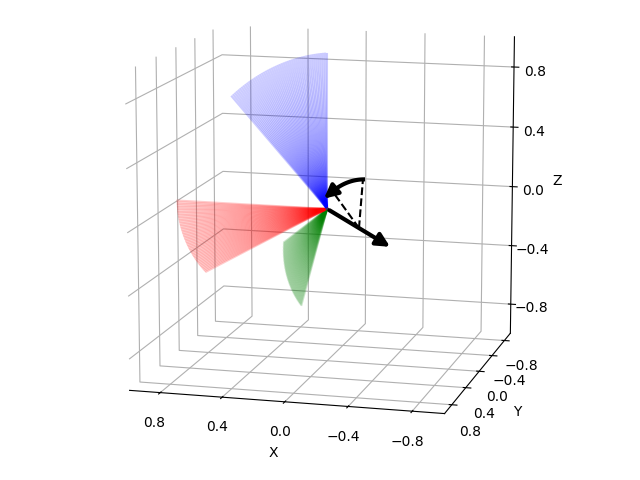
Axis-Angle Representation of Rotation#
Any rotation can be represented with a single rotation about some axis. Here we see a frame that is rotated in multiple steps around a rotation axis.
import matplotlib.pyplot as plt
import numpy as np
from pytransform3d.rotations import (
random_axis_angle,
matrix_from_axis_angle,
plot_basis,
plot_axis_angle,
)
original = random_axis_angle(np.random.RandomState(5))
ax = plot_axis_angle(a=original)
for fraction in np.linspace(0, 1, 50):
a = original.copy()
a[-1] = fraction * original[-1]
R = matrix_from_axis_angle(a)
plot_basis(ax, R, alpha=0.2)
plt.subplots_adjust(left=0, right=1, bottom=0, top=1.1)
ax.view_init(azim=105, elev=12)
plt.show()
Total running time of the script: (0 minutes 0.133 seconds)