Note
Go to the end to download the full example code.
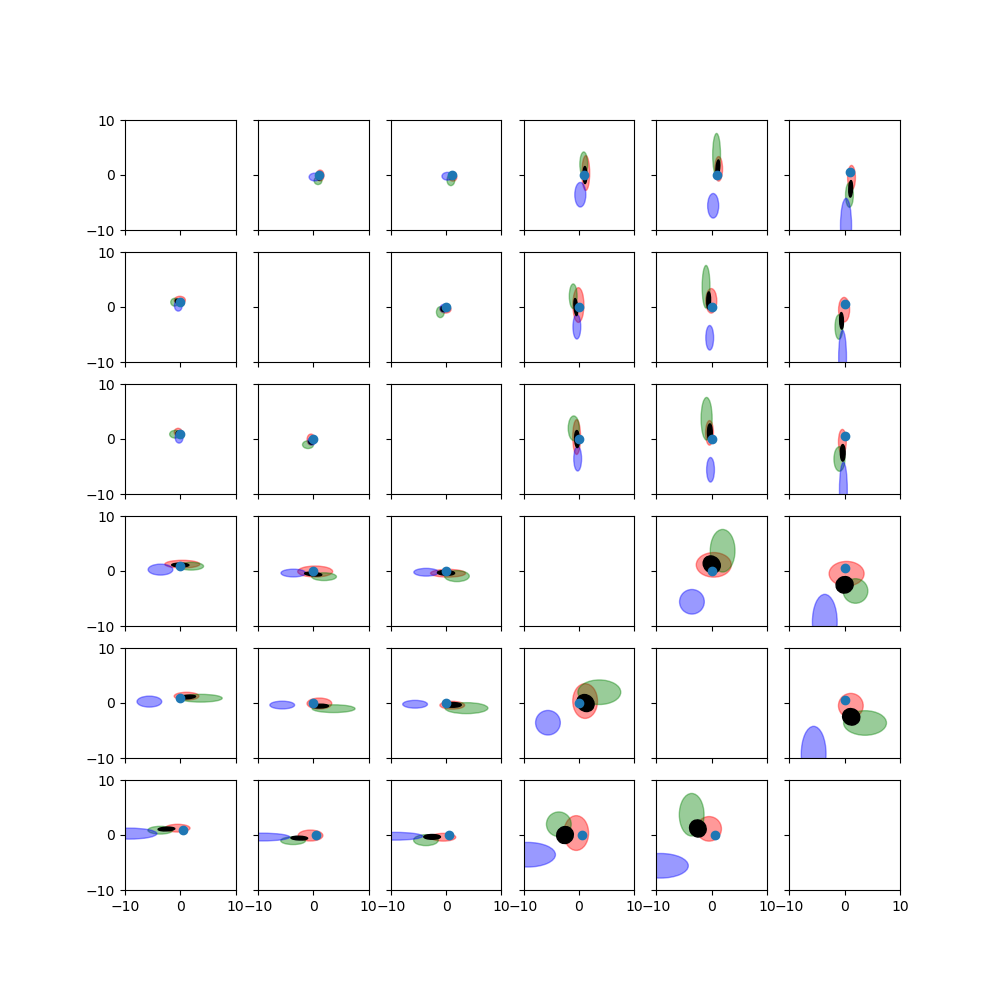
Fuse 3 Poses#
Each of the poses has an associated covariance that is considered during the fusion. Each of the plots shows a projection of the distributions in exponential coordinate space to two dimensions. Red, green, and blue ellipses represent the uncertain poses that will be fused. A black ellipse indicates the fused pose’s distribution.
This example is from
Barfoot, Furgale: Associating Uncertainty With Three-Dimensional Poses for Use in Estimation Problems, http://ncfrn.mcgill.ca/members/pubs/barfoot_tro14.pdf
import matplotlib.pyplot as plt
import numpy as np
import pytransform3d.transformations as pt
import pytransform3d.uncertainty as pu
Helper Functions#
Here you find some helper functions for plotting.
def to_ellipse(cov, factor=1.0):
"""Compute error ellipse.
An error ellipse shows equiprobable points of a 2D Gaussian distribution.
Parameters
----------
cov : array-like, shape (2, 2)
Covariance of the Gaussian distribution.
factor : float, optional (default: 1)
One means standard deviation.
Returns
-------
angle : float
Rotation angle of the ellipse.
width : float
Width of the ellipse (semi axis, not diameter).
height : float
Height of the ellipse (semi axis, not diameter).
"""
from scipy import linalg
vals, vecs = linalg.eigh(cov)
order = vals.argsort()[::-1]
vals, vecs = vals[order], vecs[:, order]
angle = np.arctan2(*vecs[:, 0][::-1])
width, height = factor * np.sqrt(vals)
return angle, width, height
def plot_error_ellipse(
ax, mean, cov, color=None, alpha=0.25, factors=np.linspace(0.25, 2.0, 8)
):
"""Plot error ellipse of MVN.
Parameters
----------
ax : axis
Matplotlib axis.
mean : array-like, shape (2,)
Mean of the Gaussian distribution.
cov : array-like, shape (2, 2)
Covariance of the Gaussian distribution.
color : str, optional (default: None)
Color in which the ellipse should be plotted
alpha : float, optional (default: 0.25)
Alpha value for ellipse
factors : array, optional (default: np.linspace(0.25, 2.0, 8))
Multiples of the standard deviations that should be plotted.
"""
from matplotlib.patches import Ellipse
for factor in factors:
angle, width, height = to_ellipse(cov, factor)
ell = Ellipse(
xy=mean,
width=2.0 * width,
height=2.0 * height,
angle=np.degrees(angle),
)
ell.set_alpha(alpha)
if color is not None:
ell.set_color(color)
ax.add_artist(ell)
Example Configuration#
A ground truth pose is known in this example. We sample 3 poses with different covariances around the ground truth pose.
x_true = np.array([1.0, 0.0, 0.0, 0.0, 0.0, np.pi / 6.0])
T_true = pt.transform_from_exponential_coordinates(x_true)
alpha = 5.0
cov1 = alpha * np.diag([0.1, 0.2, 0.1, 2.0, 1.0, 1.0])
cov2 = alpha * np.diag([0.1, 0.1, 0.2, 1.0, 3.0, 1.0])
cov3 = alpha * np.diag([0.2, 0.1, 0.1, 1.0, 1.0, 5.0])
rng = np.random.default_rng(0)
T1 = np.dot(
pt.transform_from_exponential_coordinates(
pt.random_exponential_coordinates(rng=rng, cov=cov1)
),
T_true,
)
T2 = np.dot(
pt.transform_from_exponential_coordinates(
pt.random_exponential_coordinates(rng=rng, cov=cov2)
),
T_true,
)
T3 = np.dot(
pt.transform_from_exponential_coordinates(
pt.random_exponential_coordinates(rng=rng, cov=cov3)
),
T_true,
)
x1 = pt.exponential_coordinates_from_transform(T1)
x2 = pt.exponential_coordinates_from_transform(T2)
x3 = pt.exponential_coordinates_from_transform(T3)
Fusion#
We can then fuse the 3 sampled poses with their associated covariances.
Plotting#
Each subplot shows two dimensions of the exponential coordinate space. Each sampled pose and its associated covariance matrix is displayed as an equiprobable ellipse. The fused pose estimate is also shown with its associated covariance as an equiprobable ellipse. For comparison, the ground truth pose is shown as a point.
x_est = pt.exponential_coordinates_from_transform(T_est)
_, axes = plt.subplots(
nrows=6, ncols=6, sharex=True, sharey=True, squeeze=True, figsize=(10, 10)
)
factors = [1.0]
for i in range(6):
for j in range(6):
if i == j:
continue
indices = np.array([i, j])
ax = axes[i][j]
for x, cov, color in zip([x1, x2, x3], [cov1, cov2, cov3], "rgb"):
plot_error_ellipse(
ax,
x[indices],
cov[indices][:, indices],
color=color,
alpha=0.4,
factors=factors,
)
plot_error_ellipse(
ax,
x_est[indices],
cov_est[indices][:, indices],
color="k",
alpha=1,
factors=factors,
)
ax.scatter(x_true[i], x_true[j])
ax.set_xlim((-10, 10))
ax.set_ylim((-10, 10))
plt.show()
Total running time of the script: (0 minutes 0.746 seconds)