pytransform3d.trajectories.plot_trajectory#
- pytransform3d.trajectories.plot_trajectory(ax=None, P=None, normalize_quaternions=True, show_direction=True, n_frames=10, s=1.0, label=None, ax_s=1, **kwargs)[source]#
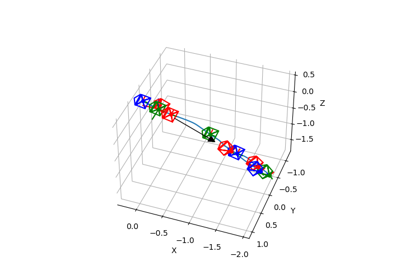
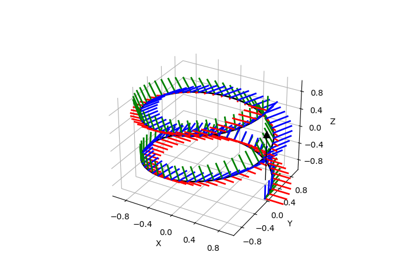
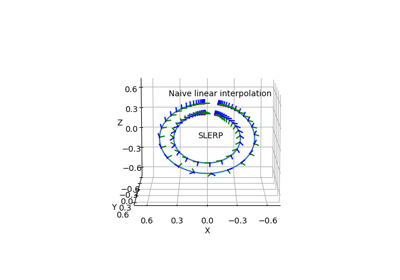
Plot pose trajectory.
- Parameters:
- axMatplotlib 3d axis, optional (default: None)
If the axis is None, a new 3d axis will be created
- Parray-like, shape (n_steps, 7), optional (default: None)
Sequence of poses represented by positions and quaternions in the order (x, y, z, w, vx, vy, vz) for each step
- normalize_quaternionsbool, optional (default: True)
Normalize quaternions before plotting
- show_directionbool, optional (default: True)
Plot an arrow to indicate the direction of the trajectory
- n_framesint, optional (default: 10)
Number of frames that should be plotted to indicate the rotation
- sfloat, optional (default: 1)
Scaling of the frames that will be drawn
- labelstr, optional (default: None)
Label of the trajectory
- ax_sfloat, optional (default: 1)
Scaling of the new matplotlib 3d axis
- kwargsdict, optional (default: {})
Additional arguments for the plotting functions, e.g. alpha
- Returns:
- axMatplotlib 3d axis
New or old axis
- Raises:
- ValueError
If trajectory does not contain any elements.