pytransform3d.transformations.plot_transform#
- pytransform3d.transformations.plot_transform(ax=None, A2B=None, s=1.0, ax_s=1, name=None, strict_check=True, **kwargs)[source]#
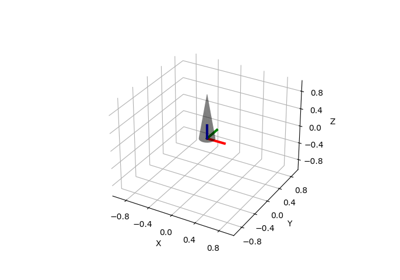
Plot transform.
- Parameters:
- axMatplotlib 3d axis, optional (default: None)
If the axis is None, a new 3d axis will be created
- A2Barray-like, shape (4, 4), optional (default: I)
Transform from frame A to frame B
- sfloat, optional (default: 1)
Scaling of the axis and angle that will be drawn
- ax_sfloat, optional (default: 1)
Scaling of the new matplotlib 3d axis
- namestring, optional (default: None)
Name of the frame, will be used for annotation
- strict_checkbool, optional (default: True)
Raise a ValueError if the transformation matrix is not numerically close enough to a real transformation matrix. Otherwise we print a warning.
- kwargsdict, optional (default: {})
Additional arguments for the plotting functions, e.g. alpha
- Returns:
- axMatplotlib 3d axis
New or old axis