pytransform3d.rotations.passive_matrix_from_angle#
- pytransform3d.rotations.passive_matrix_from_angle(basis, angle)[source]#
Compute passive rotation matrix from rotation about basis vector.
- Parameters:
- basisint from [0, 1, 2]
The rotation axis (0: x, 1: y, 2: z)
- anglefloat
Rotation angle
- Returns:
- Rarray-like, shape (3, 3)
Rotation matrix
- Raises:
- ValueError
If basis is invalid
Examples using pytransform3d.rotations.passive_matrix_from_angle#
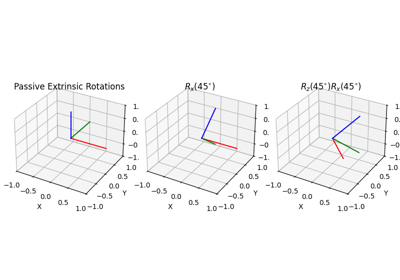
Convention for Rotation: Passive / Active, Extrinsic / Intrinsic
Convention for Rotation: Passive / Active, Extrinsic / Intrinsic