pytransform3d.camera.cam2sensor#
- pytransform3d.camera.cam2sensor(P_cam, focal_length, kappa=0.0)[source]#
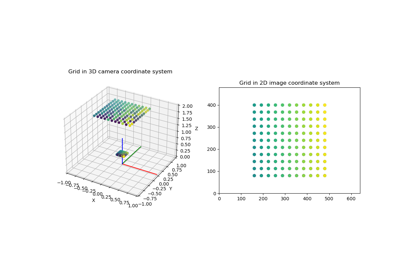
Project points from 3D camera coordinate system to sensor plane.
- Parameters:
- P_camarray-like, shape (n_points, 3 or 4)
Points in camera coordinates
- focal_lengthfloat
Focal length of the camera
- kappafloat, optional (default: 0)
Camera distortion parameter
- Returns:
- P_sensorarray-like, shape (n_points, 2)
Points on the sensor plane. The result for points that are behind the camera will be a vector of nans.
- Raises:
- ValueError
If input is not valid