pytransform3d.rotations.quaternion_slerp#
- pytransform3d.rotations.quaternion_slerp(start, end, t, shortest_path=False)[source]#
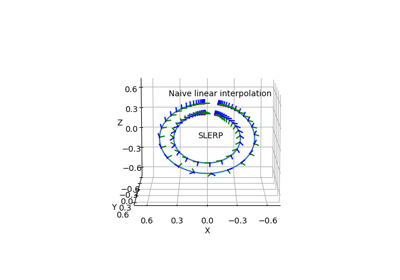
Spherical linear interpolation.
- Parameters:
- startarray-like, shape (4,)
Start unit quaternion to represent rotation: (w, x, y, z)
- endarray-like, shape (4,)
End unit quaternion to represent rotation: (w, x, y, z)
- tfloat in [0, 1]
Position between start and end
- shortest_pathbool, optional (default: False)
Resolve sign ambiguity before interpolation to find the shortest path. The end quaternion will be picked to be close to the start quaternion.
- Returns:
- qarray, shape (4,)
Interpolated unit quaternion to represent rotation: (w, x, y, z)
See also
matrix_slerpSLERP for rotation matrices.
axis_angle_slerpSLERP for axis-angle representation.
rotor_slerpSLERP for rotors.
pytransform3d.transformations.pq_slerpSLERP for position + quaternion.