pytransform3d.camera.sensor2img#
- pytransform3d.camera.sensor2img(P_sensor, sensor_size, image_size, image_center=None)[source]#
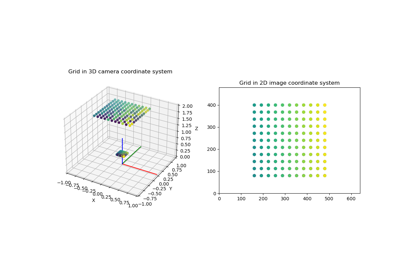
Project points from 2D sensor plane to image coordinate system.
- Parameters:
- P_sensorarray-like, shape (n_points, 2)
Points on camera sensor
- sensor_sizearray-like, shape (2,)
Size of the sensor array
- image_sizearray-like, shape (2,)
Size of the camera image: (width, height)
- image_centerarray-like, shape (2,), optional (default: image_size / 2)
Center of the image
- Returns:
- P_imgarray-like, shape (n_points, 2)
Points on image