pytransform3d.camera.make_world_grid#
- pytransform3d.camera.make_world_grid(n_lines=11, n_points_per_line=51, xlim=(-0.5, 0.5), ylim=(-0.5, 0.5))[source]#
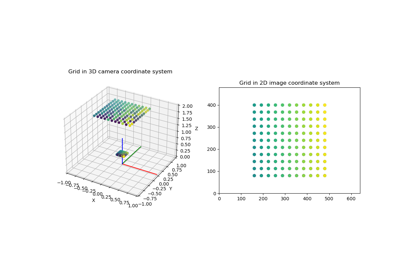
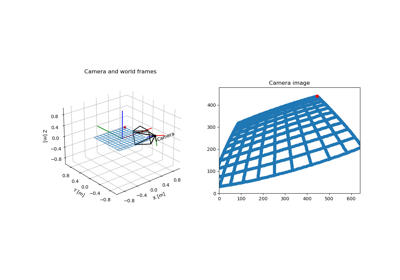
Generate grid in world coordinate frame.
The grid will have the form
+----+----+----+----+----+ | | | | | | +----+----+----+----+----+ | | | | | | +----+----+----+----+----+ | | | | | | +----+----+----+----+----+ | | | | | | +----+----+----+----+----+ | | | | | | +----+----+----+----+----+
on the x-y plane with z=0 for all points.
- Parameters:
- n_linesint, optional (default: 11)
Number of lines
- n_points_per_lineint, optional (default: 51)
Number of points per line
- xlimtuple, optional (default: (-0.5, 0.5))
Range on x-axis
- ylimtuple, optional (default: (-0.5, 0.5))
Range on y-axis
- Returns:
- world_gridarray-like, shape (2 * n_lines * n_points_per_line, 4)
Grid as homogenous coordinate vectors