pytransform3d.rotations.random_compact_axis_angle#
- pytransform3d.rotations.random_compact_axis_angle(rng=Generator(PCG64) at 0x7F8AEA9F0900)[source]#
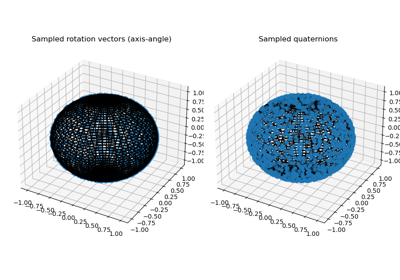
Generate random compact axis-angle.
The angle will be sampled uniformly from the interval \([0, \pi)\) and each component of the rotation axis will be sampled from \(\mathcal{N}(\mu=0, \sigma=1)\) and then the axis will be normalized to length 1.
- Parameters:
- rngnp.random.Generator, optional (default: random seed 0)
Random number generator
- Returns:
- aarray, shape (3,)
Axis of rotation and rotation angle: angle * (x, y, z)